La qualité de vol d’un drone dépendra avant tout de la manière dont il a été construit. Un quad sain nous permettra de pousser les PID et réduire le filtrage pour obtenir le meilleur comportement possible. Au travers d’un build complet, on va vous présenter nos conseils et astuces pour mettre toutes les chances de votre côté.
Le tuto en vidéo
Introduction
Il ne sera évidemment pas possible de résumer 1h30 de vidéo en quelques mots. Cet article sera essentiellement un complément à la vidéo, on mettra aussi l’accent sur les points clé.
Rappelons qu’il ne s’agit que d’une méthode parmi tant d’autres : je ne prétends pas qu’il s’agit de la meilleure façon de faire, c’est simplement une méthodologie qui fonctionne bien pour moi depuis plusieurs années. Si vous avez d’autres méthodes/astuces, n’hésitez pas à les partager en commentaires.
Vous pourrez retrouver le détails des composants de ce build dans sa fiche DroneBuilds.

Les grands principes
Pour que tout se passe pour le mieux, on essaiera de suivre ces quelques axes directeurs :
- Anticiper un maximum : avant de démarrer le build à proprement parler, prendre le temps de préparer tout ce dont on aura besoin (composants, outils, logiciels, montage à blanc, TPU…). On limitera ainsi les mauvaises surprises au cours du montage.
- Préserver le gyro : tous les moyens sont bons pour limiter les perturbations électroniques et vibrations mécaniques pouvant atteindre la FC et le gyro (softmounting, condensateur LOW ESR, spike absorber, shield anti-interférence, routage/fixation des fils…)
- Penser simplicité et maintenabilité : le quad devra pouvoir être réparé ou upgradé facilement
- Tester au plus tôt : dès qu’un composant est installé dans le build, il faut le tester pour identifier un éventuel problème. En fin de build, les différents problèmes pourraient se « mélanger » et rendre le diagnostic plus difficile, voire nous obliger à revenir en arrière.
- Prendre son temps, ne pas hésiter à défaire et refaire si nécessaire
Le matériel
Voici la liste du matériel présenté dans la vidéo :
- Bobines de fil silicone 28 AWG (signaux)
- Bobines de fil silicone 20 AWG (moteurs/condensateur)
- Fil 14 AWG (pigtail LiPo)
- Assortiment de gaines thermo rétractables
- Fer à souder (TS100…) à température ajustable (~400 °C)
- Etain au plomb
- Pompe à dessouder
- Tresse à dessouder
- Flux à souder
- Colle silicone B-7000
- Liquid tape
- Kapton tape
- Adhésif silicone double-face
- Rislans 2mm de large (Vista)
- Pince hemostat courbée
- Pince coupante
- Set de tournevis 6 pans (1.5 à 3mm)
- Cutter de précision
- Smoke stopper
- Multimètre
- Pistolet à air chaud
Vérifications à chaque étape du build
Pour éviter de cramer bêtement son drone avant même de l’avoir fait décoller, on fera attention à multiplier les tests de continuité avec un voltmètre puis les tests au smoke stopper.
Il est possible que le smoke stopper se mette en blocage lors des premiers branchements parce que le condensateur va créer un petit appel de courant. N’hésitez pas à retester 2-3 fois de suite avant de conclure définitivement à un court-circuit.
Orientation de la stack
Lors du montage à blanc, il faudra décider de l’orientation de la stack en prenant en compte différents paramètres :
- Où seront placés le condensateur et le spike absorber ?
- Par où veut on faire sortir la pigtail LiPo ?
- Quels pads de la FC va-t-on utiliser pour limiter le nombre de fils susceptibles de traverser la FC
- Le port USB doit être accessible
Filtrage électronique
Notre FC, et en particulier son gyro est sensible au bruit électronique et aux pics de tension.
L’utilisation d’un condensateur Low ESR de qualité (Panasonic, Rubycon…) est indispensable, en particulier en 6S. Pour un 5″, un condensateur de 1000 µF 35 ou 50V sera très bien. Dans la mesure du possible, on veillera à positionner le condensateur au plus proche des pads des ESCs.
Pour protéger les différents composants électroniques des pics de tension, l’ajout d’un spike absorber est une bonne idée : c’est pas cher et ça prend peu de place. Si vous alimentez votre Vista en direct LiPo, ils vous en remerciera. Si j’ai pour habitude d’utiliser ceux de chez FETtec, il existe d’autres déclinaisons.
Enfin, pour limiter le bruit électronique émis par les ESCs vers la FC, intercaler un shield anti-interférence entre la FC et les ESCs ne pourra pas faire de mal. N’oubliez pas de souder un des pads du shield à un GND de votre build. Attention également à ne pas pad avoir un pad du shield qui viendrait en contact avec des composants de la FC ou des ESCs.

Limiter les vibrations mécaniques
Un châssis réputé sain nous facilitera évidemment la vie. En plus d’améliorer sa durabilité, des bras épais de plus de 5mm sont généralement un atout pour limiter les vibrations.
Tous les éléments pouvant bouger au sein du build peuvent potentiellement créer des vibrations : tâchez de fixer un maximum de composants, avec des rislans par exemple, rien ne doit bouger.
L’antenne VTX doit être bien maintenue et son support VTX devra être assez rigide, pour limiter le risque d’oscillations transmises sur l’axe du pitch lors de manœuvres rapides.
La fixation de la stack a également son importance. Je privilégie les grandes vis traversantes pour l’ensemble de la stack, plutôt que les entretoises qui s’empilent. Si votre frame ne dispose pas de pressnuts, pensez à ajouter un écrou en métal pour maintenant ces vis traversantes parfaitement droites et limiter les vibrations qui pourraient remonter.
En général, les stacks sont fournies avec des « gummies » pour le softmounting, ils vont limiter les vibrations susceptibles de se propage vers la FC. Un softmount des ESCs présente aussi un intérêt en terme de durabilité (via gummies ou rondelles silicone).
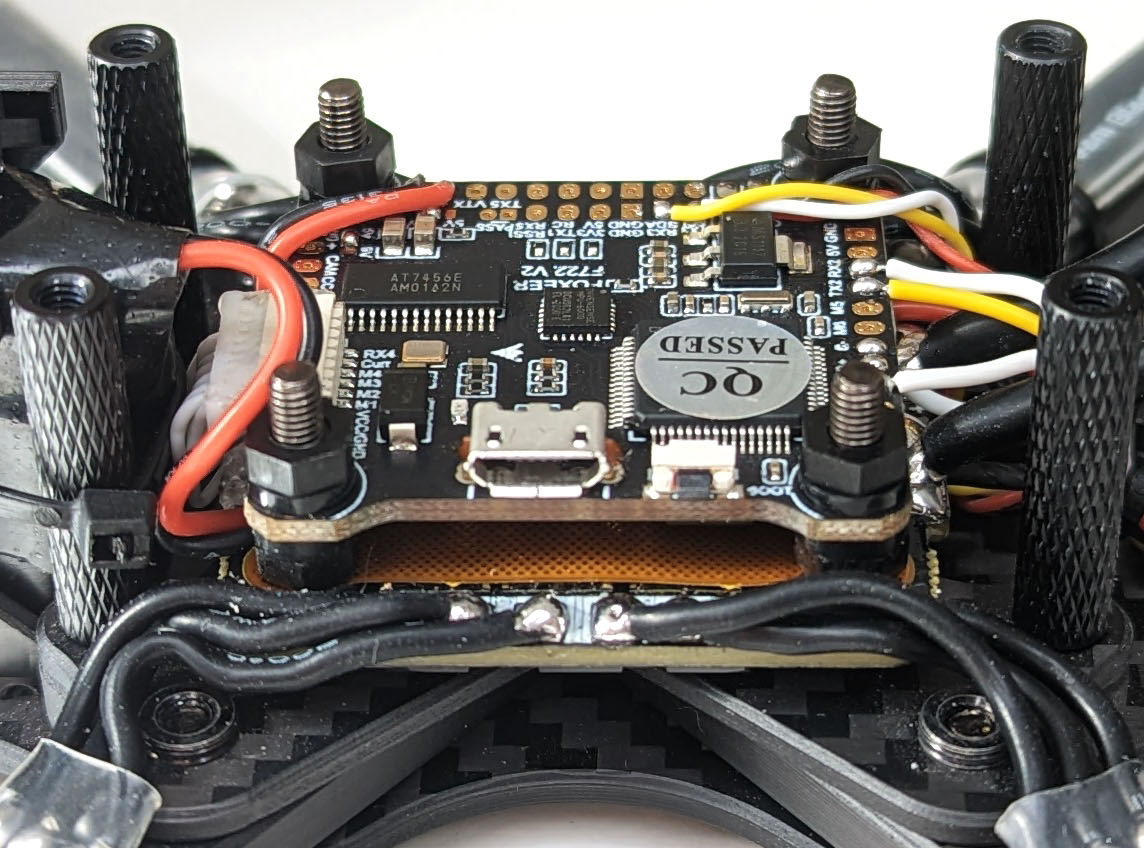
Les écrous au dessus de la FC doivent être correctement serrés : suffisamment pour que la FC ne bouge pas, sans pour étant aplatir les gummies.
Enfin, on attachera une attention particulière à la gestion du câblage pour avoir quelque chose de propre : pas de fils baladeurs non maintenus, limiter les fils traversant la stack et surtout le gyro (d’où l’importance d’identifier son emplacement), éviter les fils inutilement longs, fixer les fils des moteurs et de la pigtail etc. Des petits bouts de gaine thermo rendront le routage des fils de signaux plus propre.
Conclusion
Ne sous-estimez pas l’importance du soin accordé à la phase de build. Un quad sain est la première étape qui mènera à un quad qui vole bien et facilitera la phase de tuning (simple ou avancé).
Il n’y a finalement rien de compliqué, il suffit d’un peu de méthode et de garder en tête qu’on veut préserver le gyro d’un maximum de perturbations. Toutes les stacks ne se valent pas, certains ESCs sont plus « noisy » que d’autres, un shield anti-interférence n’est pas forcément nécessaire, le spike absorber est facultatif etc. Mais je préfère prendre un maximum de précautions, surtout quand ça n’ajoute qu’une poignée d’euros à l’addition.
Et n’attendez pas la fin pour commencer les tests : dès qu’un composant est testable, il faut le tester (test de continuité puis smoke stopper). Ainsi on identifiera les éventuels soucis au plus tôt et on évitera les mauvaises surprises de fin de build.
N’hésitez pas à venir en discuter sur le forum ou le discord, et à partager vos builds dans la rubrique DroneBuilds.