On a attaque une nouvelle trilogie dédiée au tuning ! Au fil des épisodes, on cherchera à comprendre quels aspects font qu’un tune est vraiment bon et on évoquera aussi la place des presets dans tout ça. Après avoir fait le tour des préparatifs et revu quelques bases, on expérimentera pour maximiser les performances de notre machine en décortiquant des blackboxes pour identifier les meilleurs leviers d’optimisation. On ira aussi loin que possible. Dans un 3ème temps, on abordera les aspects plus subjectifs et spécifiques d’un tune, comme le « feeling« , les usages et autres contraintes matérielles.
La vidéo
Présentation de la trilogie
Des tutos sur le tuning, on en a déjà pas mal sur la chaîne, et ils sont toujours d’actualité :
- Le tout premier, au feeling avec les sliders,
- Un second plus avancé, avec la blackbox,
- et dans l’épisode sur les filtres, on a cherché à optimiser le filtrage de la machine de Chris alias Flat FPV.
Le but n’est évidemment pas de refaire la même chose. L’approche de ces 3 nouveaux épisodes sera différente :
- Dans nos précédents tuto tuning, tout se déroule sans accrocs. Mais malheureusement, ce n’est pas toujours le cas ! Pour le premier épisode de cette nouvelle trilogie (celui-ci), on va passer en revue une vraie session tuning où RIEN ne s’est passé comme prévu ! Et c’est finalement au moins aussi intéressant que quand tout se passe bien !
- Dans l’épisode suivant, on va pousser très haut le tune d’une machine saine pour voir jusqu’où on peut aller. On va fortement réduire le filtrage et monter les PID. On verra comment ça se traduit, au niveau de la blackbox, du feeling et de la chauffe moteurs. On essaiera de mettre en avant quels paramètres ont le plus d’effet sur l’optimisation de la latence et du tracking. Bref, on va chercher à s’approcher d’un tune théoriquement parfait.
- Et dans le 3ème épisode, on va retrouver un peu de sagesse et se rappeler que le tuning n’est pas seulement une histoire de performances pures mais aussi une histoire de compromis. Il faut savoir adapter le tune à nos besoins, à nos préférences et accepter que certaines optimisations n’en valent pas forcément la peine. Je vous rassure, on fera quand même quelques tests en conditions extrêmes !
Preset et objectif du tuning
Faut-il opter pour un preset ou pour un tune spécifique pour optimiser nos machines ? Si vous êtes ici, vous avez probablement déjà la réponse. On va quand même passer rapidement en revue les avantages et inconvénients des 2 approches.
Avantages des presets
Betaflight permet d’avoir des presets pour plein d’autres aspects (LEDs, VTX, rates, OSD etc…). On ne s’intéresse ici qu’aux presets concernant le tune.
Le preset, à plus forte raison s’il est intégré dans Betaflight, va être très facile à appliquer, il ne suffira que de quelques clics de souris. En général, un preset fera nettement mieux que les réglages stocks de Betaflight, surtout s’il est optimisé pour votre frame.
L’intérêt premier des presets est donc d’aider les pilotes débutants ou qui ne se sentent pas à l’aise avec le tuning de leur machine à obtenir un tune plus performant.
Inconvénients des presets
Mais il y a évidemment aussi des inconvénients :
- Ils ne seront jamais optimisés pour votre machine, c’est le principe d’un preset, il doit être suffisamment tolérant pour s’adapter à différents setups
- Certains paramètres affectent fortement le feeling en bout de sticks, ils répondront aux attentes de certaines personnes pas aux autres
- Il peuvent ne pas être supportés par votre machine, si les PID sont trop hauts, le filtrage insuffisant, ou la balance P/D pas adaptée
- Vous ne comprenez pas ce qu’ils font
Attention, nous ne voulons surtout pas diaboliser les presets ! Ils ne sont pas optimaux pour votre machine, mais ils conviennent à énormément de pilotes qui ne veulent pas se casser la tête et fourniront souvent un rapport effort/résultat satisfaisant.
Avantages du tune spécifique
Tuner soi-même sa machine répond donc à toutes ces problématiques : vous comprenez ce que vous faites, vous adaptez le tune à vos besoins, à votre machine et à vos préférences en termes de feeling. Évidemment, c’est plus compliqué que d’appliquer simplement un preset. Mais en suivant quelques tutos, c’est loin d’être aussi difficile qu’on ne le pense. Avec un peu d’expérience, il suffit de quelques minutes pour avoir un quad qui se comporte vraiment très bien !
Définition d’un bon tune
A quoi sert le tuning ? Qu’est-ce qu’un bon tune ? C’est une question qu’on se reposera au fil de ces 3 épisodes. On verra qu’il y a différentes façons d’y répondre.
Pour le moment, on se contentera de dire qu’un bon tune fera en sorte que notre drone fasse correctement ce qu’on lui demande via nos sticks. On détaillera, puis on nuancera cette première définition dans les 2 prochains articles.
Une session tuning où rien ne se passe comme prévu
Pour plus de détails, on vous invite à regarder la vidéo. Pour résumer, lors d’une session tuning avec Matthieu (non, pas Motard Geek) qui n’aurait dû durer que quelques minutes, nous avons rencontré de nombreux obstacles :


- Un bras était fortement délaminé et était anormalement flexible
- Une hélice était mal serrée
- La blackbox a mis en avant un problème de bruit sur l’axe du pitch (confirmé au ressenti et à l’oreille). Les arrêts sur les flips rapides et secs avaient un rebond anormal.
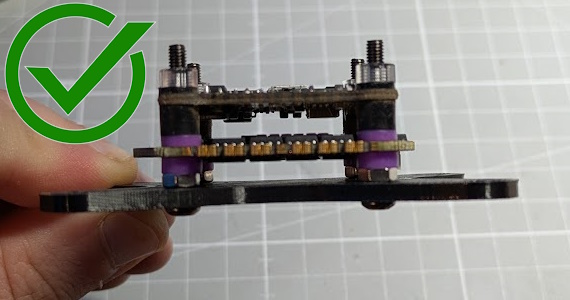
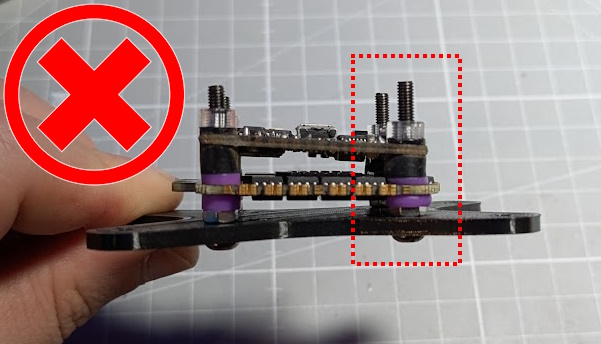
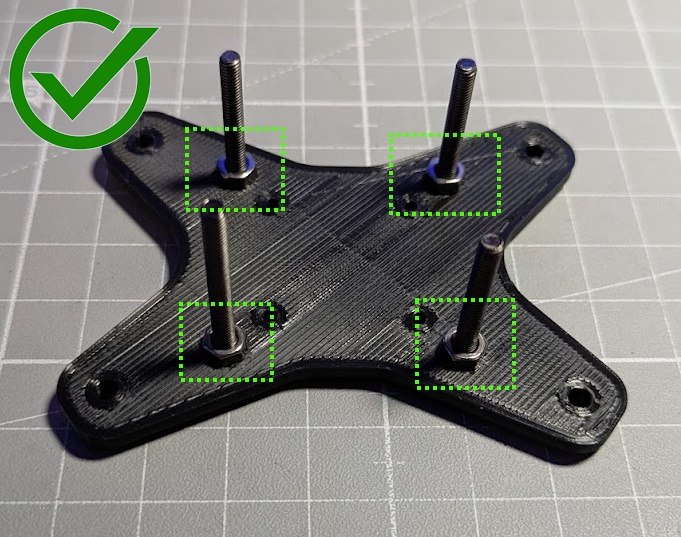
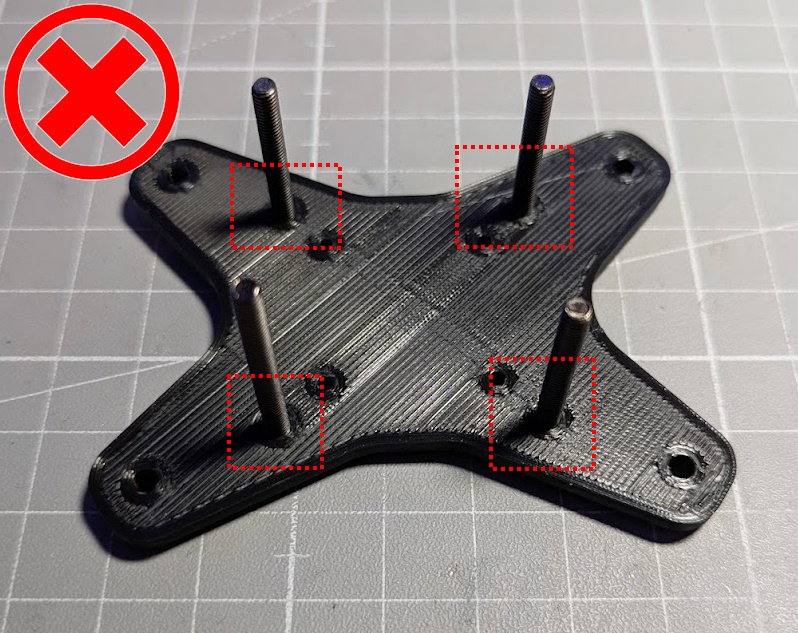
- La stack s’est avérée mal vissée :
- Les softmounts étaient beaucoup trop serrés d’un côté, au point que la FC était en pente
- Une vis de la FC étaient complètement déserrée
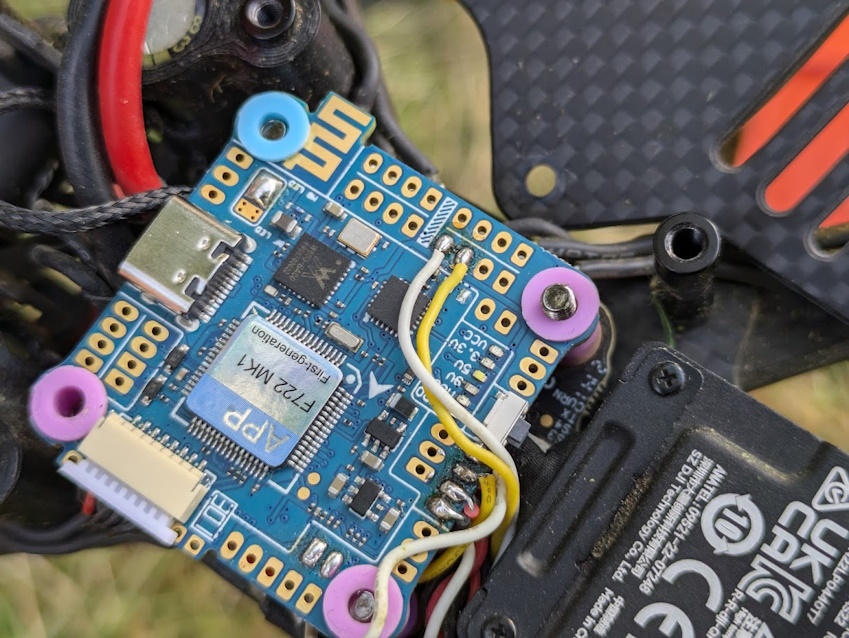
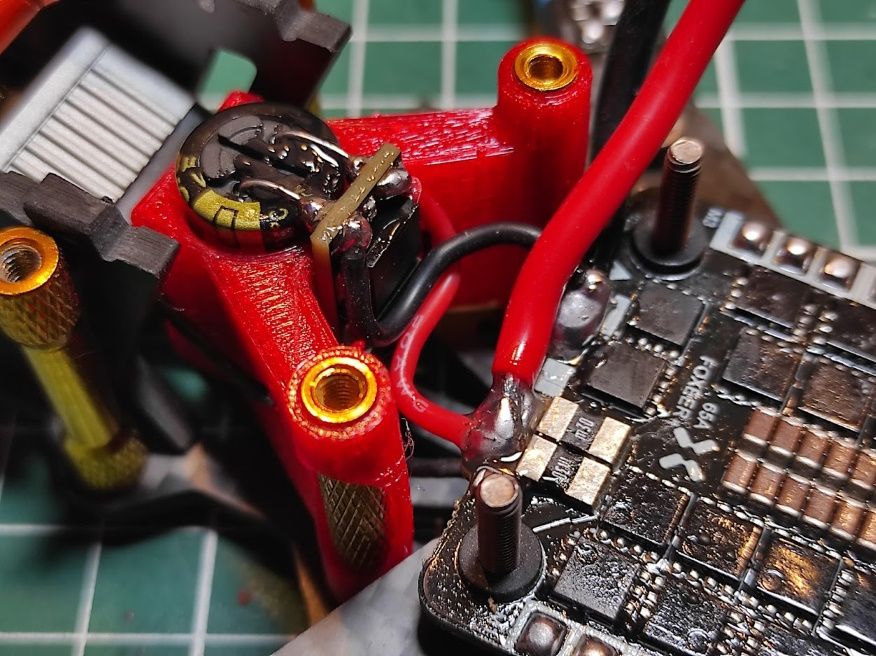
- 2 fils étaient directement en contact avec le gyro
- Malgré la correction de ce problème, l’anomalie sur le pitch était toujours présente
- Nous avons tourné la FC de 90° sur l’axe du Yaw, pour inverser le Pitch et le Roll. Le problème a été transféré sur le Roll, ce qui a confirmé un gyro défectueux, malgré le fait que la FC soit neuve.
- Inutile d’aller plus loin dans ces conditions, il faut remplacer la FC (ou au moins le gyro si l’on est équipé)
Cette expérience nous apporte quelques premiers enseignements :
- Par défaut, Betaflight est ultra tolérant. Il volait quand même passablement correctement avec un bras partiellement cassé, une FC mal fixée, des fils contre le gyro et un gyro défectueux sur un axe !
- Même avec un FC neuve, on n’est pas à l’abri d’un gyro défectueux, chez aucun constructeur
- Il est important de faire un certain nombre de contrôles avant de se lancer dans le tune de sa machine
Les contrôles pré-tuning
Ce n’est pas obligatoire, mais tant qu’à faire, autant mettre à jour tous les firmwares. Pour profiter des dernières améliorations et corrections de bugs. Si vous êtes frileux, n’hésitez pas à laisser couler quelques semaines après la sortie de la dernière version d’un firmware avant de l’installer. Histoire que les éventuels bugs majeurs aient été identifiés et corrigés.
Le lien radio
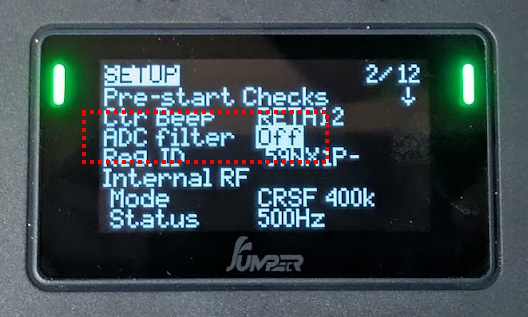
- Sur votre radio OpenTX ou EdgeTX, le filtre ADC doit impérativement être désactivé.
- La radio doit être calibrée, les extrêmes des canaux bien positionnés autour de 1000 et 2000 avec un centre à 1500.
- Au niveau du TX, la fréquence du packet rate doit être réglée à la valeur que vous allez vraiment utiliser
Les ESCs
- Idéalement, assurez vous qu’ils supportent le DShot Bidirectionnel, pour pouvoir activer le filtre RPM sous Betaflight. Pas de souci à partir de la version 32.7 de BLHeli32, ou avec toutes les versions de AM32. Si vous avez des ESCs 8-bits, sous BLHeliS, il faudra les flasher en BlueJay pour pouvoir en profiter.
- En général les réglages par défaut font l’affaire. Une PWM Frequency fixe à 48 Khz est souvent sûre et passe partout. Une PWM Frequency Variable entre 24 et 48 khz peut aussi être un compromis intéressant.
Betaflight
- Restaurer les valeurs par défaut (en particulier pour les filtres et PID),
- On désactive le Dmax pour avoir des D fixes (slider « Atténuation dynamique » à 0)
- On désactive le Feed Forward (slider « Réponse des sticks » à 0), on le remontera en fin de tuning. Si on veut aller vite, on peut aussi tuner avec, surtout si les valeurs ne sont pas très hautes.
- On vérifie que le quad supporte le DShot Bidirectionnel et on vérifie qu’il est bien activé dans l’onglet « Moteurs »
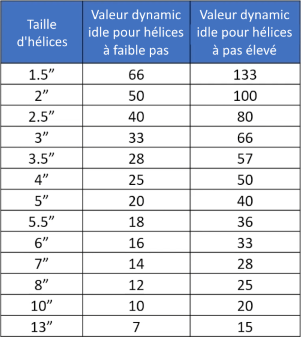
- Si le DShot Bidirectionnel est activé, on en profite pour assigner une valeur au Dynamic Idle ou Ralenti Dynamique en français. Cette valeur correspond essentiellement à vos hélices. Sur mes 5”, je le positionne à 30. Le tableau ci-dessous vous aidera à choisir une valeur adaptée :
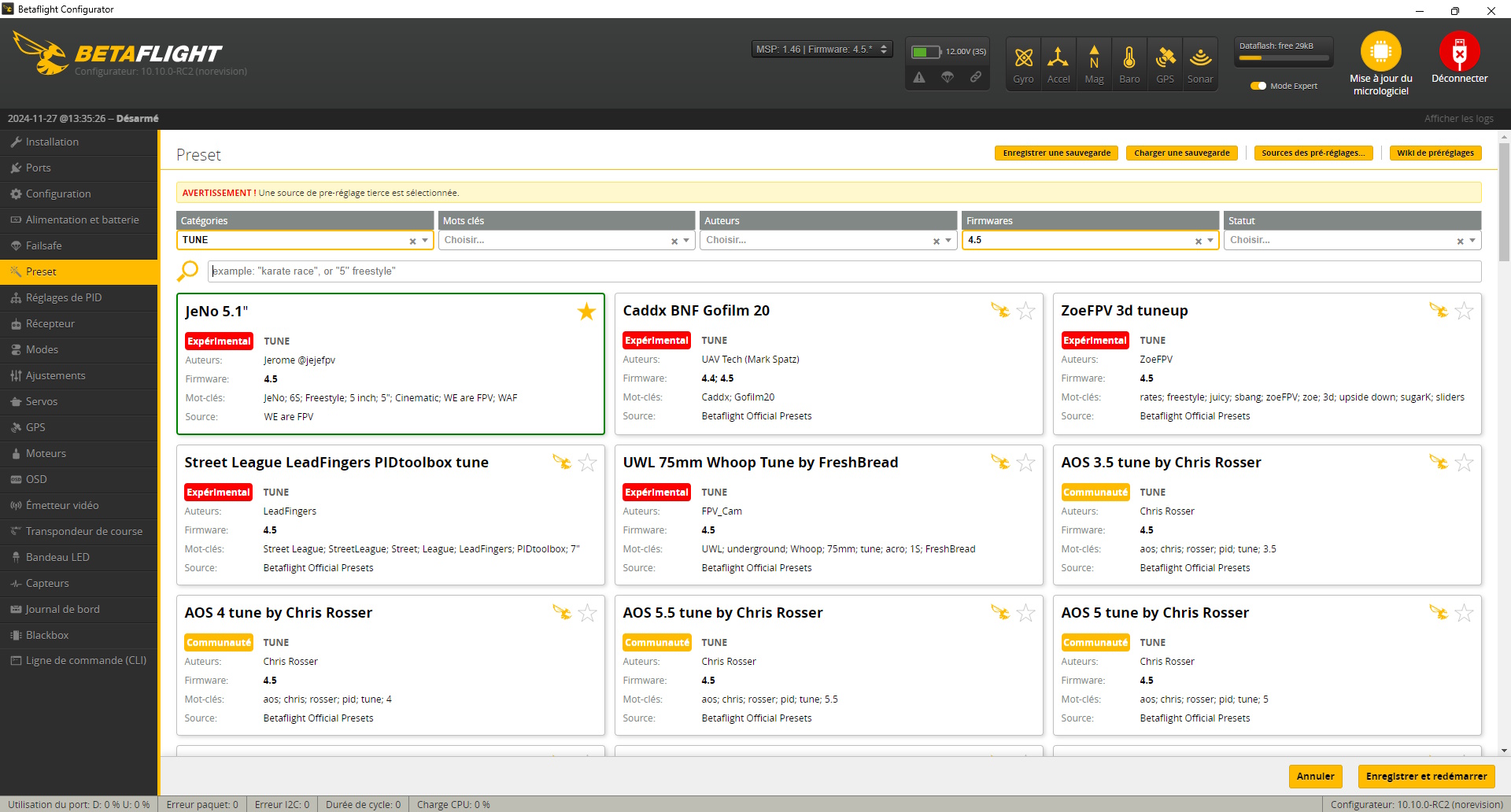
- On applique le preset adapté à notre lien radio (en pensant à remettre le RC Smoothing Auto Factor autour de 30, dans l’onglet « Récepteur »)
- On configure la Blackbox pour une fréquence d’enregistrement autour de 2 KHz, pour pouvoir voir les vibrations au dessus des 500 Hz
- On vide la Blackbox
Concernant le Ralenti Dynamique (et ici), on y reviendra plus en détail dans les prochains articles. Retenez simplement qu’il va remplacer le ralenti moteur qui se trouvait dans l’onglet « Moteurs » (anciennement DShot Idle).
Ca correspond à la vitesse minimale des moteurs quand les gaz sont à 0. Le problème de l’ancien ralenti moteur, c’est qu’il varie en permanence pendant le vol. Avec le Dynamic Idle, le firmware connaît la vitesse de rotation réelle des moteurs (grâce au Dshot Bidirectionnel). Il peut ainsi garantir que la vitesse du ralenti est en permanence respectée. Ce qui donne un comportement plus consistant et prévisible à votre machine.

Vérifications matérielles
Quand tout est en ordre côté logiciels, on passe au contrôle du matériel pour mettre toutes les chances de notre côté !
- Vérifier le serrage de toutes les vis : bras, châssis, moteurs, hélices, caméra, stack…
- Fixer tous les composants mobiles, en particulier les fils, avec des rislans par exemple
- S’assurer qu’aucun fil ne touche le gyro
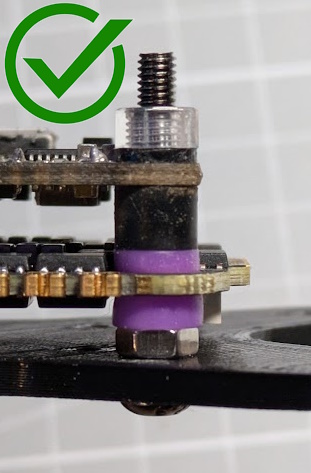
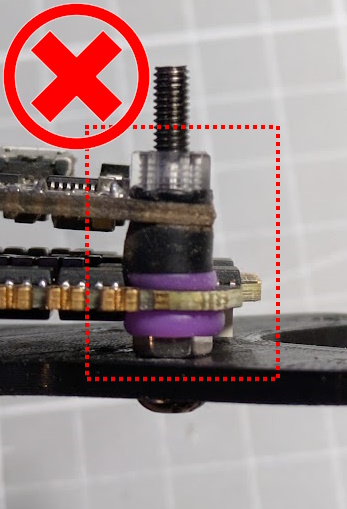
- Vérifier que la stack ne bouge pas, qu’elle est correctement softmountée. Les vis doivent être légèrement serrées sans trop compresser les gummies. La base des vis doit être correctement verrouillée par un écrou ou pressnut histoire qu’elle ne puisse pas se débattre
- S’assurer qu’un condensateur est présent au plus proche des ESCs. Un spike absorber est un bonus mais ce n’est pas obligatoire et ça ne devrait pas influer sur le tune final
- Vérifier la rigidité des bras dans les diagonales
- Chercher les indicateurs de délamination ou de fissures dans le carbone
- Eviter si possible les antennes VTX très longues qui vont gigoter et prévoyez un support TPU rigide pour bien les maintenir
- Si le quad embarque une Action Cam, le support caméra doit être suffisamment rigide
- Utiliser des hélices neuves pour s’épargner de faux problèmes
1er vol de diagnostics : état de santé du quad
Une fois que tout est d’équerre, on peut faire un premier vol de quelques dizaines de secondes pour valider l’état de santé de la machine.
On fait comme d’habitude : 2-3 rolls et flips très rapides, au moins un full gaz de 1 ou 2 secondes, on enchaîne avec quelques split-s. C’est l’affaire de 30 à 40 secondes et ça nous fournira suffisamment d’informations.
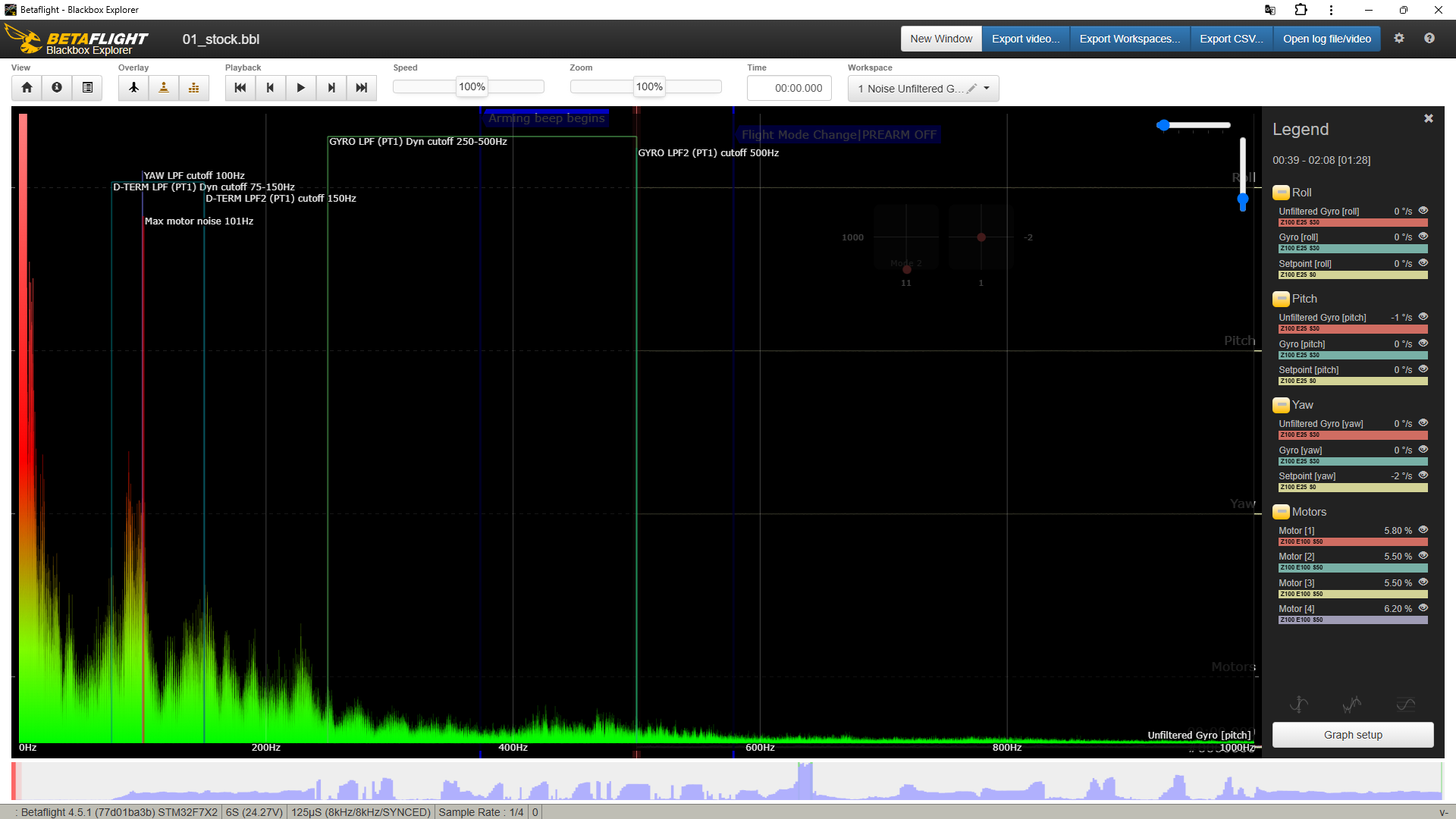
Et c’est là que seule la Blackbox vous apportera une réponse claire et précise. Pour chaque axe, on va utiliser l’analyseur de données pour visualiser la répartition des vibrations sur le signal gyro non-filtré de chaque axe.
Si vous n’êtes pas à l’aise avec la Blackbox, n’hésitez pas à aller voir notre guide complet. Vous y trouverez notamment l’espace de travail que j’utilise.
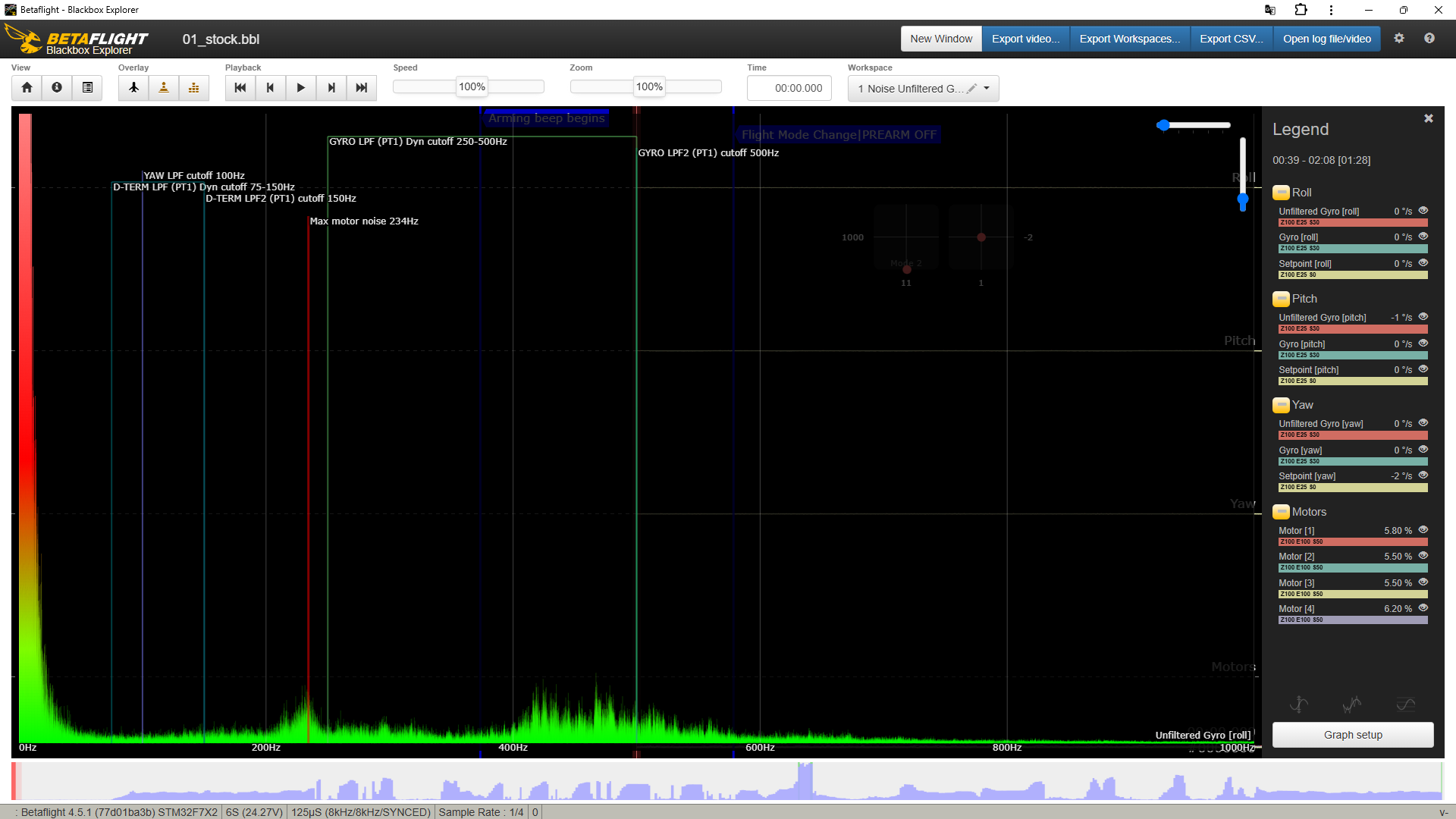
Si le quad est sain, vous devriez voir un bruit normal et dégressif entre 0 et 50 Hz. Ce sont les mouvement réels et désirés du quad. Entre 50 et 150 Hz, ça devrait être aussi plat que possible, proche de 0. C’est cette zone qui est critique. Au-delà, vous pourriez avoir un ou 2 pics, ce n’est pas forcément problématique.
Vérifiez également qu’après filtrage, les éventuels pics disparaissent sur tous les axes.
Si c’est le cas, vous êtes prêt à tuner votre machine ! Sinon, il va falloir essayer de trouver la cause du problème.
L’importance de la Blackbox
On insiste un peu, mais la Blackbox est un outil surpuissant, on vous encourage à vous y intéresser. Surtout que pour les contrôles de base, il n’y a que très peu de choses à savoir, comme on vient de le voir.
Autant régler les PID au feeling, ça se fait assez facilement. Autant pour le filtrage, vous ne ferez que des approximations pifométriques en vous basant sur le son et la chaleur des moteurs. Mais personne n’est capable d’identifier, par exemple, un pic de vibration à 180Hz et un autre à 450 Hz, juste au feeling.
Optimiser le filtrage d’une machine sans Blackbox, ça revient à tuner à l’aveugle, on tâtonne, on sur-filtre, alors qu’on pourrait avoir des réponses ultra précises en quelques secondes !
Conclusion
Pas de tuning dans ce premier article… dédié au tuning. On a quand même expliqué l’intérêt d’un tune custom par rapport à des presets, c’était aussi l’occasion de mettre en avant l’importance de la préparation et rappeler que le concept de “machine saine”, ce n’est pas juste des paroles en l’air.
C’était aussi intéressant de montrer que parfois les choses ne se passent pas comme prévu. Il faut juste être méthodique et chercher les causes du problème avant de reprendre le tuning dans de bonnes conditions.
Dans le prochain épisode, on partira à la chasse du “tune parfait”, du moins en théorie. Dans le 3ème épisode, on revient vers la pratique, en se posant les questions liées aux usages, aux habitudes et aux préférences de chacun.
Et comme vous le verrez, il est important de ne pas opposer la théorie et la pratique, les 2 sont complémentaires.
Ce n’est pas parce qu’un pilote est calé sur la théorie et la technique qu’il doit ignorer l’importance du “feeling”, ni même d’autres paramètres spécifiques à sa machine ou à sa pratique. Et bien sûr inversement, ce n’est pas parce qu’un pilote expérimenté n’est pas à l’aise avec la théorie ou la blackbox qu’il doit dénigrer leur importance.
Tout est complètement lié. Et c’est d’ailleurs là le but de la série Au Coeur du Drone : vous donner les clés de cette compréhension.