Au-delà de la performance pure, on attend de nos machines qu’elles soient adaptées à nos usages, à nos besoins et à nos préférences. Dans le 3ème volet de cette trilogie « Tuning », on va se pencher sur les aspects plus subjectifs et spécifiques du tune. On fera aussi quelques expériences pour mesurer l’impact de différents dégâts infligés sur notre drone pour comprendre comment mieux les compenser au niveau de son tune.
La vidéo
L’effet de palier (« good enough »)
On est allé très loin dans l’épisode précédent. Mais on voudrait relativiser les efforts nécessaires pour avoir un quad qui vole bien.
Si vous êtes déjà un peu habitué à régler vos machines, vous avez dû vous en apercevoir. L’amélioration des performances n’est pas vraiment linéaire.
C’est à dire qu’il est très facile de faire quelques optimisations simples de filtrage et de PID qui vont directement amener le quad à un bon comportement en vol. Et les optimisations qu’on fait par la suite sont plus subtiles et plus dures à percevoir.


En gros, et sans exagérer, si vous vous contentez de monter le slider Multiplicateur Maître et les 2 sliders de filtrage à 1.4, en général, vous allez drastiquement améliorer le comportement de votre quad et il volera déjà plutôt pas mal ! La suite, c’est de l’optimisation.
On n’est pas en train de dire qu’il ne faut pas tuner vos machines. Il y a quand même un plaisir à régler son quad avec précision, à l’adapter à nos besoins et à comprendre ce qu’on fait. Mais il est quand même très facile de booster les performances d’une machine par rapport à la configuration par défaut sans faire le moindre effort, à condition bien sûr que la machine soit saine.
Le « feeling »
Dans l’épisode précédent, on jugeait de la qualité d’un tune uniquement sur ses performances. C’est évidemment très important, mais c’était aussi bien pratique. Les performances, c’est très concret, parce qu’on sait mesurer et démontrer l’efficacité de chacun de nos choix. La démarche est scientifique et factuelle.
On va maintenant évoquer d’autres paramètres, plus subjectifs, qui vont inévitablement influencer notre tune et on va commencer par le plus délicat, celui qui peut faire couler les plus d’encre : le fameux “feeling”.
Pourquoi c’est délicat ?
C’est compliqué parce que ça reste assez vague et chacun met ce qu’il veut dedans, c’est un concept un petit peu fourre-tout.
C’est évidemment hyper personnel parce qu’il est bien question de ressenti ici. Et qui dit ressenti dit expérience et surtout d’habitudes de chacun !
Et on est forgé par nos habitudes. Par exemple, prenez un pilote qui à l’habitude de voler sous KISS depuis des années. Donnez-lui un quad sous Betaflight, même très bien tuné, donc avec moins de latence et un meilleur tracking.
Il y a 9 chances sur 10 qu’il vous dise que le tune ne lui plaît pas. Tout simplement parce qu’il est habitué au comportement de son quad et pour lui, c’est la norme et c’est ça un bon tune. Et il n’aurait pas tort, parce qu’au bout du compte, ce qui importe vraiment, c’est d’être à l’aise avec sa machine.
Mais ça montre à quel point nos habitudes construisent nos repères.

Réglages Betaflight qui influent sur le feeling
On va maintenant passer en revue les paramètres de Betaflight qui vont avoir un impact fort sur le ressenti que vous aurez en vol :
- Même si c’est évident : vos rates sont la première chose qui va impacter votre lien avec la machine, tout comme la courbe des gaz si vous décidez d’appliquer de l’expo.
- La balance P/D : certains pilotes n’attachent pas tant d’importance que ça à la balance P/D, le fait d’avoir un quad qui overshoot un peu leur donne l’impression d’avoir un quad plus réactif. Je pense que ça découle surtout d’une mauvaise habitude. Mais comme on parle de ressenti, tout le monde ne partagera pas forcément mon avis et c’est pas grave.
- Les I : on a plus de latitude pour l’ajustement des I, certains aiment en avoir beaucoup, d’autres moins. Plus on aura de I, plus on aura une sensation de quad verrouillé sur sa ligne et de mouvements « robotiques« . On ne s’éternise pas trop dessus à cause du réglage suivant.
- Le Feed forward, aussi miraculeux soit-il, ça peut être déstabilisant d’avoir un quad qui anticipe trop nos mouvements. C’est toujours bien d’en avoir un peu, au moins autour de 100, pour améliorer la réactivité du quad, mais cessez de l’augmenter si ça devient gênant. Je pense que vous pouvez y aller jusqu’à 200.
- Le renforcement des gaz (Throttle Boost) : augmente temporairement les gaz quand un mouvement rapide sur le stick des gaz est détecté, toujours dans un souci de réactivité améliorée, c’est un peu le FF du Throttle.
Le iTerm Relax, en théorie
Le iTerm Relax a carrément le droit à sa propre partie ! Je vous en parle régulièrement et j’insiste parce que je pense que c’est l’un des réglages qui a le plus d’impact sur le ressenti qu’on a en vol.

Vous le savez, les I accumulent de l’erreur au fil du temps pour permettre de corriger les petites dérivations par rapport à la consigne sur le temps. Ils permettent de corriger ce que les P ne peuvent pas corriger à cause d’une erreur trop petite à un instant T.
Mais lors de mouvements très rapides, une grosse erreur est générée, elle est corrigée par les P essentiellement et on ne veut surtout pas l’emmagasiner dans le terme I, qui est là que pour corriger la dérive au fil du temps. Donc on suspend l’accumulation de l’erreur sur les mouvements rapides. C’est le fameux iTerm Relax.
Plus la valeur de cutoff est basse et plus longue sera la suspension de l’accumulation autour d’un mouvement rapide et même un peu moins rapide. On désactive l’accumulation du terme I plus fréquemment.
A l’inverse plus elle sera haute, plus les I continueront d’accumuler, même sur une partie des mouvements les plus rapides. Et les I auront un effet plus important, ils accumuleront plus qu’avec une valeur de cutoff basse.
Le iTerm relax, en pratique
Ce que vous devez retenir, en termes de feeling, c’est que plus cette valeur sera basse, et plus le quad sera “libre” de ses mouvements sur ses axes, le tracking des sticks sera meilleur, mais les petites erreurs de sticks seront plus visibles.
Au contraire, une valeur plus élevée aura tendance à ancrer le quad sur ces axes, et donc sur ses trajectoires, vous aurez une impression de rigidité, comme si une force supplémentaire poussait pour garder le quad sur sa ligne. Ca donnera des lignes plus propres en masquant quelques défauts de sticks, par contre le quad perdra un peu en agilité.
Pourquoi ne pas simplement baisser les I quand on veut un quad plus libre sur ses axes ? Tout simplement parce qu’on veut aussi que le quad se comporte bien, même quand il y a un peu de vent et qu’on ne touche pas aux sticks. On a donc besoin d’avoir un certains niveau de I. L’Iterm relax permet ensuite d’ajuster les moments où on souhaite suspendre son accumulation d’erreur.
La valeur par défaut de 15 est un très bon compromis. Essayez des valeurs de 10 et de 20 pour bien prendre conscience de l’impact de ce réglage.
Et bien plus encore…
Dans l’absolu, la plupart des fonctionnalités peuvent avoir un impact sur le ressenti. Mais on va s’arrêter là, je pense qu’on a vu les plus importantes. On vous laisse creuser la linéarisation des gaz, la compensation du sag etc. si ça vous intéresse.
S’adapter à la machine
Le second point qu’on voulait aborder, et qui va impacter notre tune concerne la machine en elle-même !
On l’a vu lors des préparatifs au tuning du premier épisode : on essaie de s’arranger pour avoir un quad sain. Mais parfois, ce n’est pas possible et dans ce cas, le tune va nous permettre de contourner ces problèmes matériels.
Pour illustrer cette situation, voici quelques exemples :
- Lors de la review du BetaFPV Air65, on a décidé de remplacer la canopy en plastique fragile par une canopy en TPU indestructible. Le TPU étant plus flexible, cette modification a engendré l’introduction de vibrations.
Grâce à la Blackbox, on n’a pu facilement localiser cette vibration. Il a suffit de placer un filtre précisément à sa fréquence pour complètement régler le problème. - Autre exemple : pas de chance, vous avez un souci dans votre build, mais vous n’en trouvez pas l’origine. Un problème de frame ? de moteurs ? Ou tout simplement un quad bien fatigué avec les roulements rincés ?
Parfois, adapter le filtrage au problème peut suffire pour continuer à voler dans de bonnes conditions. Ne serait-ce que temporairement en attendant de trouver l’origine du souci ou d’avoir les finances pour remplacer le matos. - Les châssis plus gros sont bien souvent plus sujets aux vibrations. Là encore, un tune adapté vous permettra d’en tirer le meilleur.
S’adapter à l’usage
Et enfin, le dernier point qui va impacter les réglages de notre quad c’est évidemment l’usage que l’on va en faire !
De manière générale, peu importe l’usage, on prévoira un peu de marge de tolérance pour encaisser une légère dégradation de la machine : vis qui se desserrent, hélices abîmées etc.
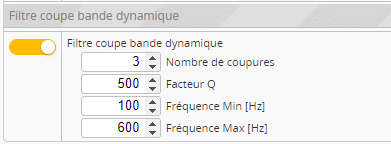
Quoiqu’il arrive, il est fortement recommandé d’activer le filtre notch dynamique. D’une part, depuis sa réécriture en version 4.3, il est super performant et efficace. C’est-à-dire qu’il va atténuer très fortement les pics de vibration en ajoutant très peu de délai.
Et d’autre part, comme son nom l’indique, il est dynamique, il va donc s’adapter à votre quad, tant que la vibration se trouve dans son spectre de détection. Par défaut, entre 100 et 600 Hz. Donc c’est un très bon filet de sécurité pour intercepter des pics de vibrations aléatoires.
Long Range et vol cinématique
Si vous faites du LR, ou même pour du vol cinématique, notamment à la montagne et que votre quad subit de grosses perturbations, ça peut être une bonne idée d’augmenter le Dynamic Idle (ralenti dynamique), pour que le quad soit plus stable quand les gaz sont à 0.
Vol cinématique
Concernant le Dynamic Idle, le même conseil s’applique que pour le Long Range. Vous pouvez l’augmenter pour plus de stabilité.
Pour un usage cinématique, davantage d’I Term relax aidera à avoir de belles lignes bien tendues et on évitera de trop forcer sur le Feed Forward.
Freestyle
Si vous faites essentiellement du freestyle avec beaucoup de mouvements la tête en bas et que le hang time vous paraît trop court (c’est à dire que le quad redescend trop vite vers le sol lorsque vous êtes la tête en bas), ou même qu’il plane un peu trop quand il est à l’endroit, vous pourrez un petit peu baisser le Dynamic Idle.
Ce même conseil est valable si vous utilisez le ralenti moteur classique, anciennement Dshot Idle.
En Freestyle, on visera la performance et la justesse du tune pour limiter le propwash et optimiser le tracking, tout en gardant une certaine marge de tolérance pour enquiller les crashs et pouvoir repartir.
Si vous êtes du genre à tirer vos hélices jusqu’au bout avant de les remplacer, il faudrait prévoir encore plus de marge.
« Plus de marge » signifie : plus de filtrage et les PID moins hauts.
Race
Concernant la course, je n’ai pas d’expérience, donc je vous invite à partager en commentaires vos recommandations et à me corriger si je dis trop de bêtises :
- La température des moteurs est une contrainte bien plus importante en race que pour les autres pratiques, on aura tendance à limiter les D et à garder un filtrage confortable, quitte à avoir un peu plus de propwash et d ‘overshoot.
- Il y a même pas mal de pilotes qui tournent en config stock, c’est certainement une bonne base pour les PID et les filtres.
- L’I term Relax cut off est souvent autour de 20, voire plus, pour faciliter les trajectoires bien verrouillées
- Et je vais m’arrêter là pour pas dire trop de bêtises ^^

Bando et « torture test »
Un dernier usage qu’on voudrait aborder, vous vous en doutez, c’est le bando ! C’est probablement la pratique qui fait subir les pires sévices à nos quads. Et très souvent, on abuse du turtle mode et on doit revenir avec un quad dans un piteux état.
Tout le monde sera d’accord pour dire qu’il faut prévoir un tune très tolérant. Mais ce que je vous propose, c’est de reproduire quelques cas courants de « quad dégradé » et de regarder comment ça se comporte réellement dans la Blackbox. Pour se donner une idée approximative du niveau de filtrage qu’il faudrait envisager. Evidemment, je suis repassé en config stock pour faire ce test. Voilà les cas qu’on va étudier :
- Vol témoin : config stock hélices neuves
- avec 1 et 2 bras légèrements desserrés
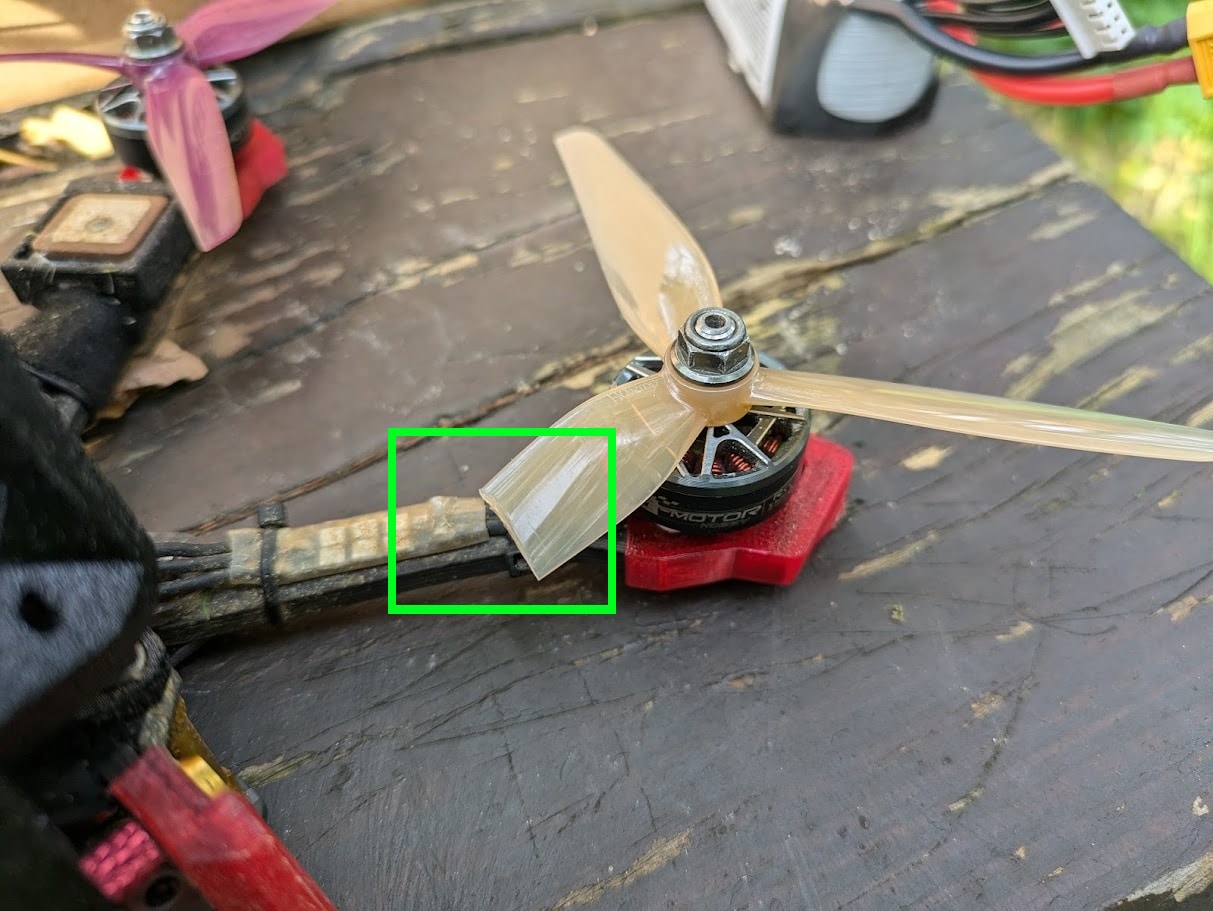
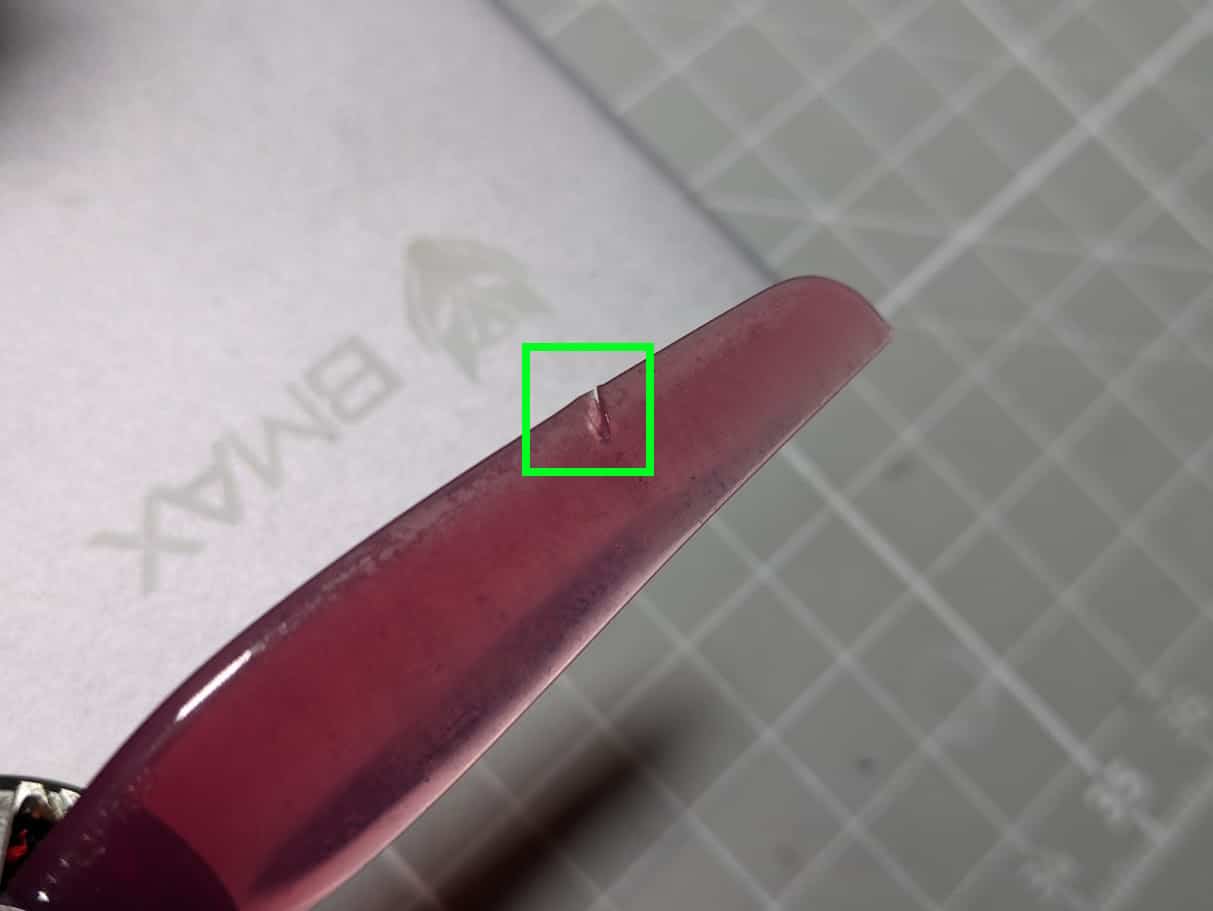
- une pale tordue
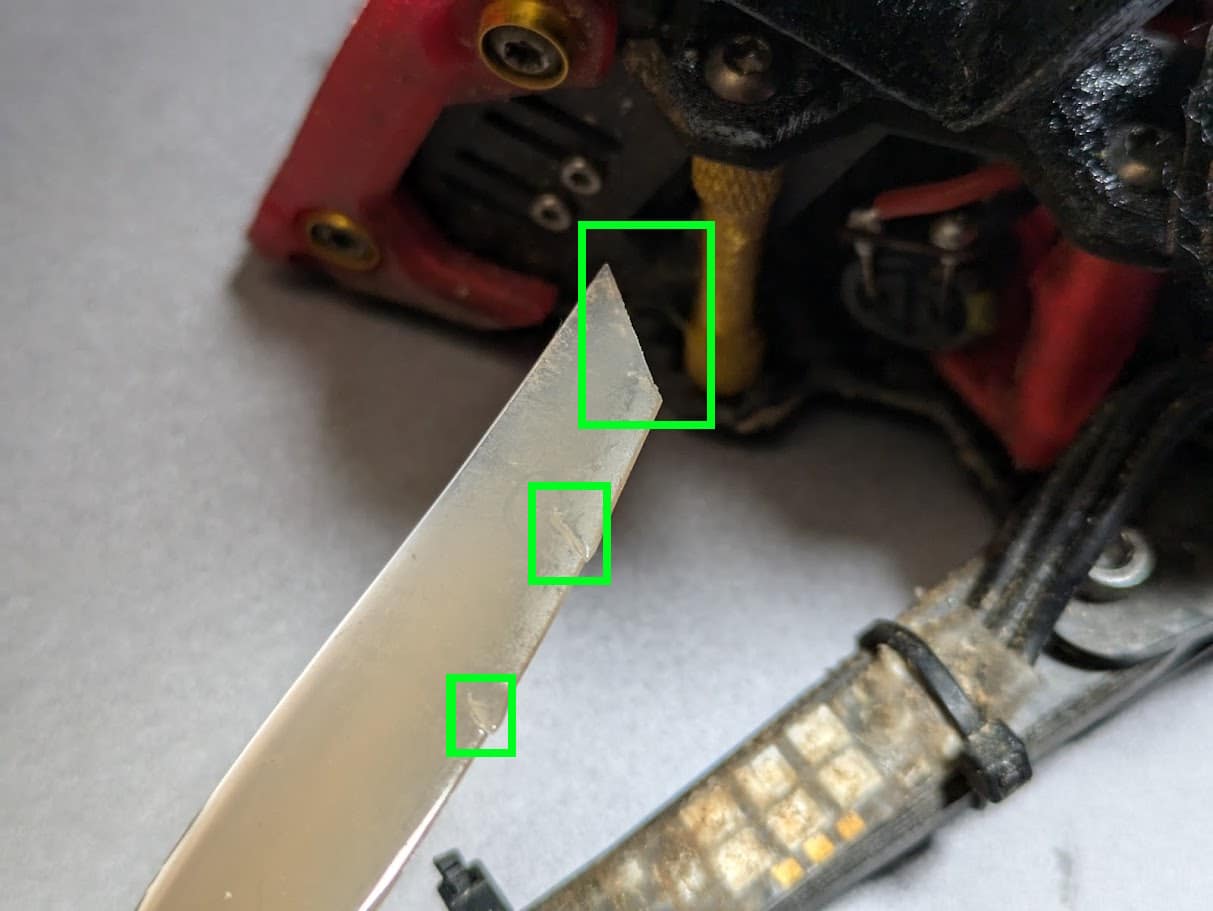
- une pale tordue, 5 pales raccourcies et pas mal de pales abîmées
- une pale complètement coupée
- une pale coupée et une pale complètement tordue



Résultats des tests
Pour le détail de l’analyse des Blackboxes, je vous invite à regarder la vidéo de l’épisode.
Attention, ces tests ne concernent que mon setup, ça ne veut pas dire qu’on aura les mêmes résultats sur d’autres machines, mais ça donne un ordre d’idées. Et voici les quelques points qui en ressortent :
- Ce qui pose de très loin le plus de problème, c’est l’arrachage pur et simple d’une pale. C’est certainement ce qui déséquilibre le plus une hélice et donc génère le plus de vibrations. La bonne nouvelle, c’est probablement ce qui arrive le moins souvent.
- Tous ces problèmes d’hélices ont l’air finalement de créer des gros pics de bruit essentiellement sur une plage de fréquences assez haute : entre 150 et 300 Hz. Et ça c’est une très bonne nouvelle vu que ça se filtre assez facilement.
- Et ce qui m’a encore le plus étonné, c’est que le filtrage par défaut de Betaflight, écrase tous ces pics de bruit à la perfection, même quand une pale était complètement arrachée !
Pourquoi le filtrage par défaut est si efficace ?
Si le filtrage par défaut de Betaflight est si efficace, c’est grâce à 2 choses :
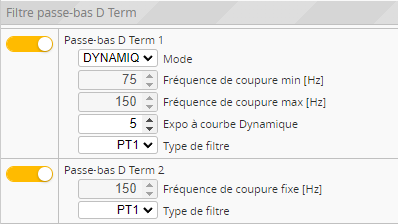
- Les filtres passe-bas Dterm qui filtrent à partir de 150Hz. Le premier étant dynamic, donc lié au niveau de gaz commence même à filtrer plus tôt quand les gaz sont bas
- Et le filtre RPM fait des miracles, comme toujours
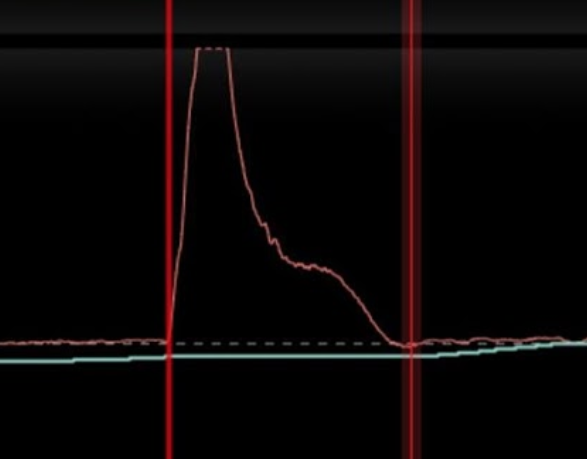
Si on utilise le mode de Debug « FFT_FREQ », contre toute attente, même avec la pire de nos Blackboxes, on constate que le signal gyro est déjà correctement nettoyé. Avant même d’arriver au notch dynamique !
Le debug nous permet seulement de voir les informations concernant le Roll, qui était le plus propres de nos axes. On ne peut pas exclure que le filtre notch dynamique n’est pas plus utile sur le Pitch et le Yaw.
Quels ajustements pour le bando ?
Je ne vais pas vous vendre un preset spécial bando. Il faudrait passer plus de temps à le tester sur différents setups. Mais ce qui ressort de ces quelques informations est déjà super intéressant et devrait vous donner des pistes pour vous faire un filtrage optimisé. Ou même reproduire nos expériences sur vos machines.
De manière générale, on voit que le filtrage par défaut est exceptionnellement efficace. Il peut vraiment constituer une base de départ solide. Pas besoin de mettre 2 filtres BIQUAD ou PT2 sur le signal gyro en entrée du D Term par exemple. Pas besoin de filtrer fortement le signal gyro commun non plus.
Par contre le filtre RPM est un « must have » et un notch dynamique est un bon filet de sécurité.
On n’a pas évoqué les PID dans la situation du bando, mais la principale recommandation ici sera de ne pas trop abuser des D. Vu qu’ils vont avoir tendance à amplifier les vibrations et augmenter la chauffe.
D’ailleurs le bando c’est probablement un des rares cas avec la race où je trouverais justifié d’avoir un léger déséquilibre entre les P et les D. C’est à dire que je conserverais des P assez hauts pour la réactivité et le tracking, mais je ne maximiserais pas forcément les D, quitte à avoir un poil d’overshoot.
Je ne fais pas de bando très souvent. Mais quand j’y vais, je garde en général mes PID habituels, qui sont relativement hauts. Parfois je redescends le slider multiplicateur maître de 0.1 et je n’ai jamais eu de souci.
Conclusion
Ainsi s’achève cette trilogie sur le tuning, on a essayé d’avoir une approche un peu différente des tutos habituels sur le sujet, et on espère que vous aurez trouvé l’expérience intéressante.
On va essayer de résumer tout ce qu’on s’est en quelques secondes :
- Ne sous-estimez pas la phase de pré-tuning, votre machine doit être aussi saine que possible avant de commencer à tuner. La BlackBox vous fournira instantanément un aperçu de l’état de santé de votre quad
- La performance d’un tune est en grande partie mesurable, c’est la capacité du quad à suivre la consigne le plus efficacement possible. Encore une fois, la blackbox est un outil ultra puissant, elle est sans équivoque. Elle permet de voir des choses qu’on ne percevrait pas forcément et qui créent pourtant de la chauffe moteur par exemple. Elle va vous permettre d’identifier à quelle fréquence des vibrations apparaissent. Et du coup à quelle fréquence de coupure positionner vos filtres et encore bien d’autres choses.
- Le tuning se doit de prendre en compte des aspects plus spécifiques ou subjectifs. Vous devez avant tout être à l’aise avec le comportement de votre quad, certains pilotes, du fait de leurs habitudes, seront plus à l’aise avec un quad objectivement moins bien optimisé, mais tant qu’ils sont à l’aise avec, c’est finalement ça le plus important.
- Un tune doit être adapté : à la fois à votre machine si elle présente des problèmes qui ne peuvent pas être corrigés autrement. Et à la fois à votre pratique : entre du LR, du ciné, de la race, du Freestyle et du bando, on n’aura pas les mêmes priorités et on ne fera pas les mêmes compromis.
- Le mieux est l’ennemi du bien, ou plutôt que passé un certain palier, vous allez perdre du temps à faire des optimisations qui auront un impact vraiment négligeable. Sachez vous arrêter quand vous estimez que le comportement de votre machine est satisfaisant.
On vous souhaite de très belles fêtes de fin d’année, profitez bien de vos proches, et on se dit à l’année prochaine !