Suite à notre test du iFlight Nazgul5 V2 HD, on a publié un guide de tuning pour BetaFlight qui vous a beaucoup plu. Voici donc venu la version EmuFlight (version 0.3.3). Plus qu’un preset prêt à l’emploi, voyez-y plutôt une démarche de réglage à effectuer par vous-même en prenant soin de tester chaque paramètre en toute sécurité.
Les réglages filtres / PID en vidéo
Pour régler le Nazgul5 on a suivi cette procédure détaillée dans le topic unique dédié à EmuFlight sur le forum.
Les réglages de base
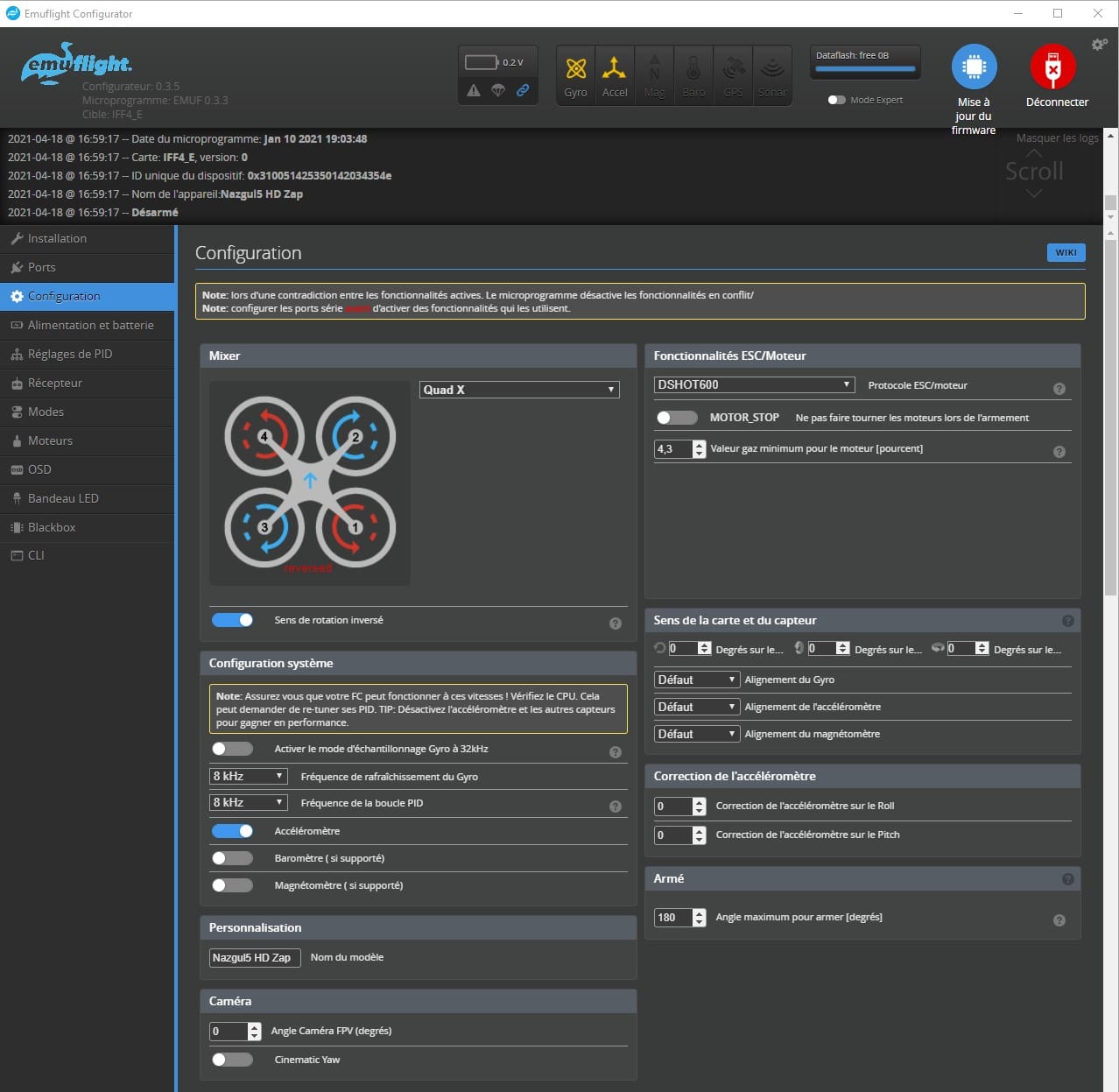
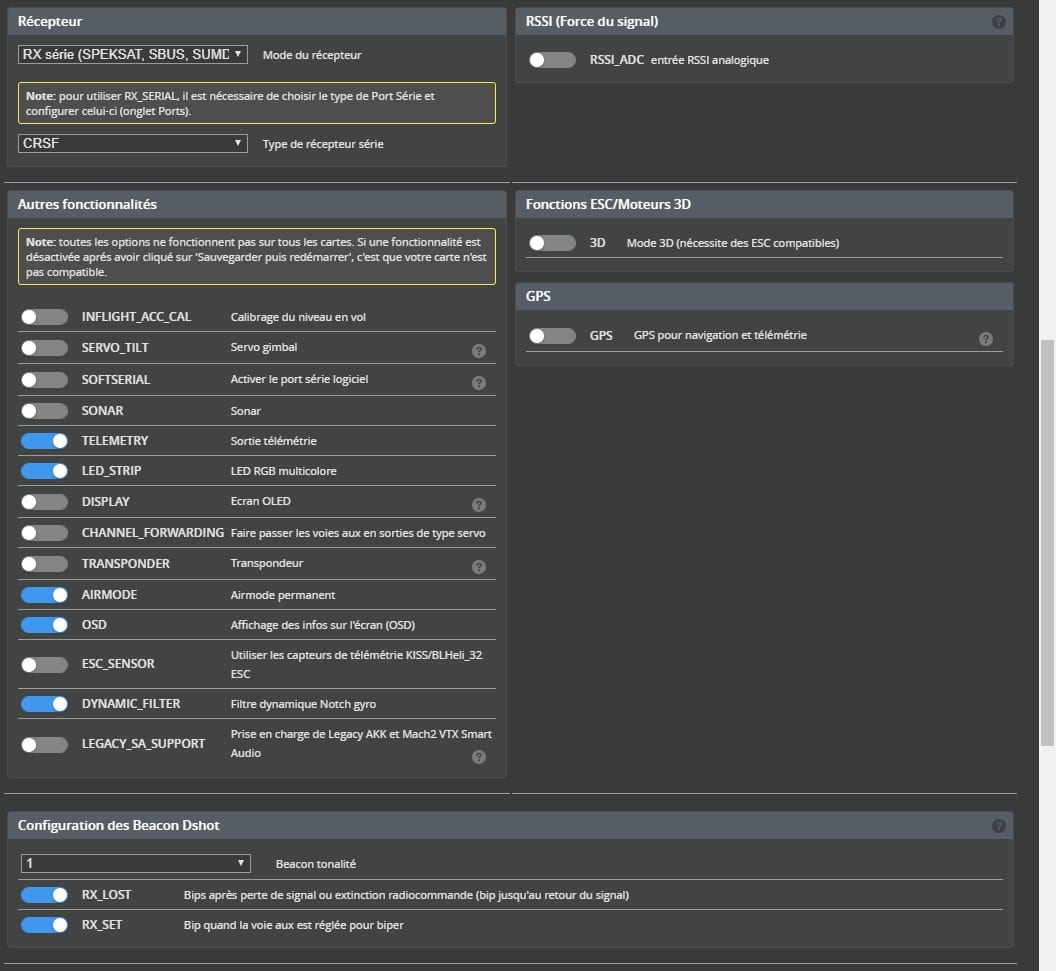
Les ESCs BLHeli_S du Nazgul5 V2 sont annoncés comme compatibles DShot1200 mais le drone n’arme pas dans cette configuration. J’ai donc laissé le paramètre par défaut qui est DShot600. J’ai juste légèrement réduit le ralenti (idle passé de 4,5 à 4,3) et laissé les boucles (8k/8k) et fonctionnalités (dont le dynamic filter) par défaut.
Les filtres
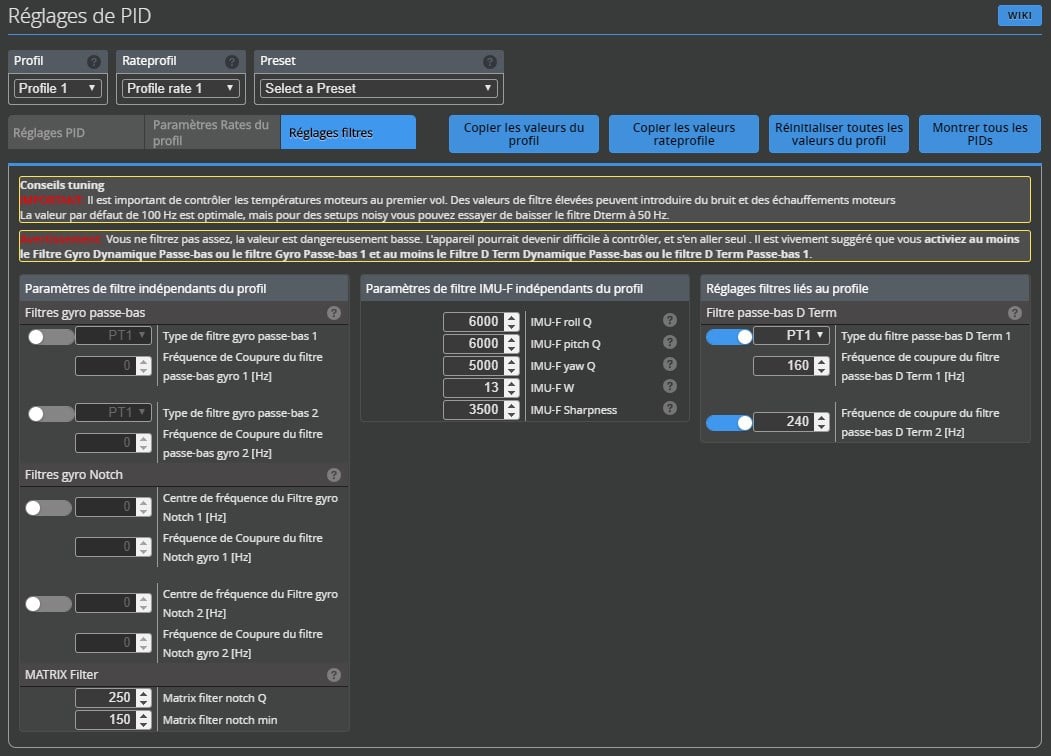
Dans l’ordre, j’ai tout d’abord monté progressivement les fréquences de coupure des filtres D Term afin de réduire le filtrage. Ensuite, j’ai complètement désactivé le filtre passe-bas du gyroscope pour ne laisser que l’IMU-F. Pour ce dernier, j’ai considérablement augmenté les valeurs de Q et Sharpness. Le W a quant a lui été plus que divisé par 2.
Les PID
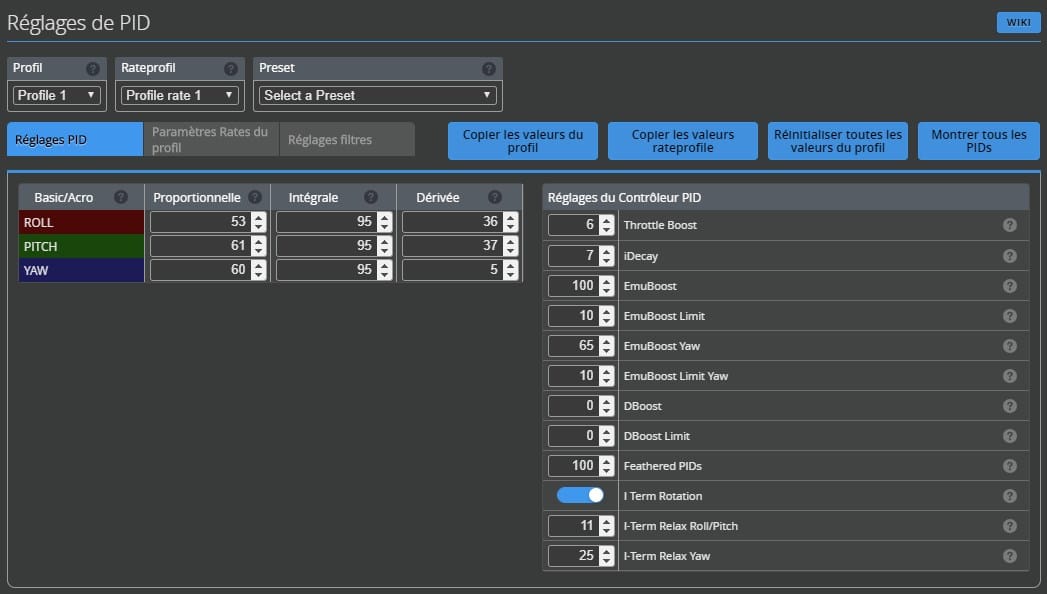
Contrairement à BetaFlight (4.2 et plus), il n’y a pas de curseurs pour faciliter les réglages PID. Cependant, en ayant bien diminué le filtrage, le kwad vole déjà beaucoup mieux. J’ai donc très légèrement augmenté les PID pour surtout jouer sur les paramètres Throttle Boost, iDecay et EmuBoost.
Rates, TPA et deadband
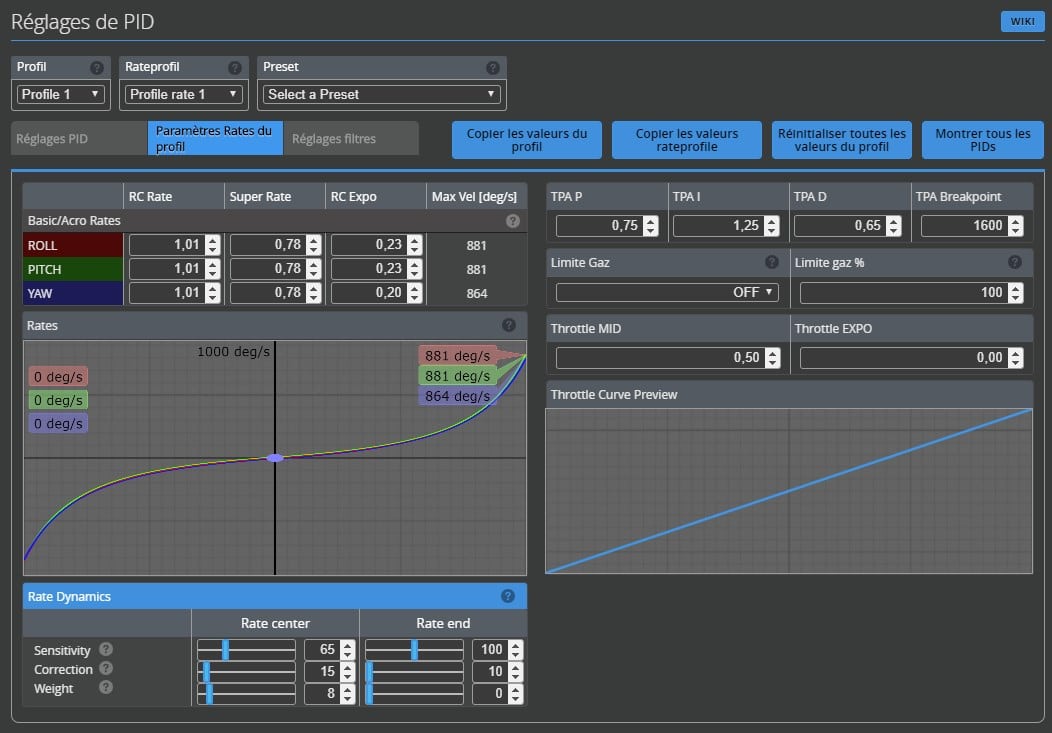
Même aberration que BF, le TPA est configuré dans le profil de rates sous Emu… Par défaut il agit sur les 3 gains sur la fin de gaz (à partir de 1600μs) pour réduire les P à 75% et D à 65% tandis que le I est boosté à 125% (un peu comme l’anti-gravity), je l’ai laissé ainsi.
Niveau rates, j’ai un poil augmenté la vitesse angulaire maximum en fin de course et surtout excessivement diminué la sensibilité autour des neutres.
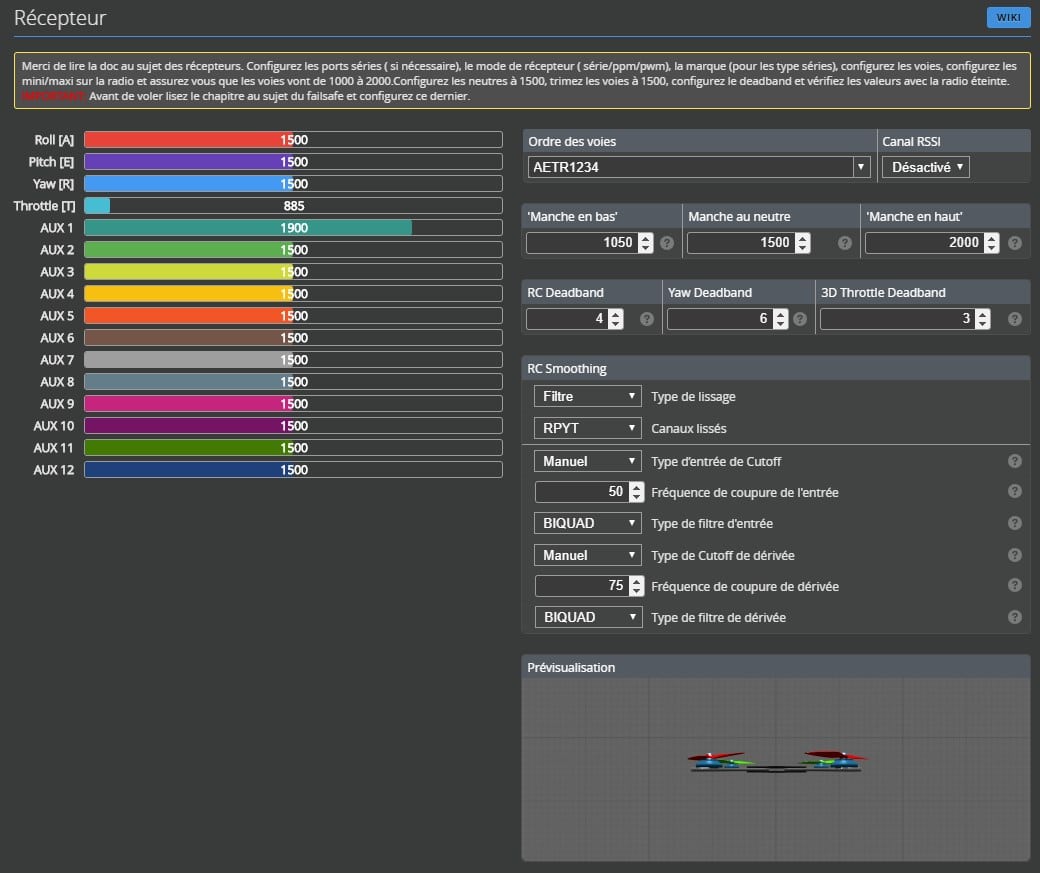
Pour finir, comme toujours, j’ai ajouté un peu de deadband pour gommer les mouvements parasites que je peux faire à chaque fois que je ramène mes sticks aux centres.
Conclusion
Encore une fois, ces réglages filtres et PIDs améliorent considérablement le comportement en vol du Nazgul5 V2 HD. Dans mon cas, les moteurs ne chauffent pas et il n’y a pas de vibration. Ce preset tolère même des hélices abimées voire tordues. Cependant, chaque kwad est différent. Par prudence, testez donc chaque réglage un à un avec un test à vue sans monter trop haut et en contrôlant la température des moteurs !
Si vous faites des modifications à ce tuning ou que vous avez mieux à proposer, n’hésitez pas à le faire dans les commentaires de la vidéo YouTube.