La sécurité en FPV est un point crucial de notre hobby. Évidemment, personne n’a envie de transformer un gosse de cinq ans en nem avec ses grosses hélices 5 ou 6 pouces. Personne n’a plus envie que la législation se durcisse au point de ne plus pouvoir pratiquer le vol en drone FPV. Il faut donc s’auto-discipliner et appliquer non seulement les consignes décrites dans la loi, mais aussi les règles de bon sens. Le FailSafe est une des bases de la sécurité sur nos machines et ne doit pas être pris à la légère. Il évite d’avoir une machine qui tourne sans personne aux commandes et donc potentiellement de blesser quelqu’un ou de perdre sa machine.
Il existe 2 types de FailSafe
Nouvelles machines ou machines ayant subies des changements dans son électronique se doivent d’avoir un FailSafe activé et testé. Le plus efficace et le plus simple est celui de BetaFlight, EmuFlight, Kiss ou tout autre firmware de contrôleur de vol moderne. Mais il existe aussi celui du Rx (récepteur radio). Il peut notamment servir sur les configurations sans carte de vol comme certaines ailes volantes par exemple. Le FailSafe du contrôleur de vol se déclenche quand la transmission entre le Rx et la FC est rompu. Mais que se passe t-il quand la coupure se trouve entre le Rx et le Tx ? Dans ce cas de figure, c’est le FailSafe du Rx qui fait le job, sauf si vous avez paramétré ce dernier (via la radiocommande bien souvent) sur « no pulse » afin qu’il n’envoie plus rien au contrôleur quand il n’est plus en liaison avec l’émetteur.
Le failsafe du contrôleur de vol (FC)
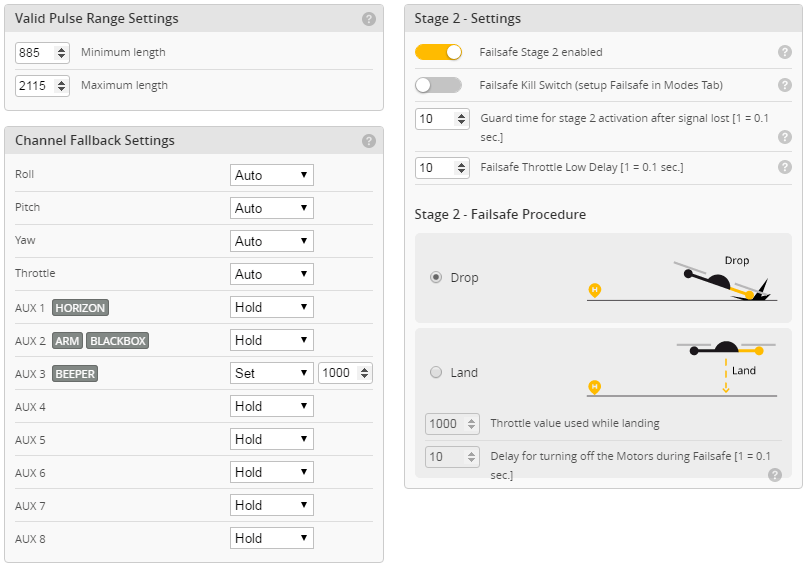
Betaflight et les autres firmware ont une option failsafe à activer. Certains firmwares proposent plus d’options. Par exemple la possibilité de garder un filet de gaz pendant quelques secondes afin d’éviter la chute brutale.
L’option type drop est celle qu’il faut choisir. Elle actionne une coupure net des gaz en cas de perte de signal du Rx. Le choc sera probablement plus violent pour votre drone ainsi, mais au moins les hélices seront arrêtées et le risque de blessure est réduit en cas de choc avec quelqu’un.
Il y a aussi des options de retour à l’emplacement de décollage (RTH) mais elles ne sont utilisées que dans des cas précis comme le Long Range.
FailSafe du récepteur radio (Rx)
Afin de s’assurer du bon comportement du multirotor en cas de rupture de liaison entre le Rx et le Tx (la radiocommande) sans passer par la FC, il faut activer le failsafe du Rx. La procédure d’activation du FailSafe dépend du récepteur, il faut donc consulter la documentation du constructeur.
Pour exemple sur un Rx FrSky D4R-II, une fois bindé, il faut :
- Brancher la LiPo,
- Allumer la radio,
- Mettre la radio dans la position dans laquelle vous souhaitez que la machine reste (gaz coupé dans l’idéal, moteurs désarmés, autres sticks au centre et switch du buzzer sur activé),
- Et enfin, faire un appui cour sur le bouton de binding du Rx.
Cette procédure est à faire une seule fois sauf si vous bindez votre Rx à nouveau.
FailSafe configuré, on passe au test.
Avant la première session, une fois le FS configuré comme il se doit, on s’assure que les hélices ne sont pas sur les moteurs afin d’effectuer un test.
On branche la LiPo, on allume la radio, on arme les moteurs et on les fait tourner. On insiste, il ne doit pas y avoir d’hélices montées sur le drone. Enfin, éteignez votre radiocommande. Si tout est bien configuré, la machine doit s’arrêter. Si ce n’est pas le cas, il ne vous reste plus qu’à vérifier chaque étape avant d’effectuer un autre test.
Quand le drone aura passé ce test avec succès, il ne vous reste plus qu’à aller voler !