Les filtres sont indispensables au bon fonctionnement de nos drones : pour que la boucle PID puisse faire son travail correctement, elle doit recevoir des signaux propres. Dans cet épisode on va voir à quoi servent les filtres et comment ils fonctionnent avant de détailler la stratégie de filtrage dans Betaflight. On finira par du concret en se penchant sur la machine de Flat FPV.
L’épisode 1 de la série « Au Cœur du Drone »
La promesse de l’épisode
Au terme de cet épisode vous saurez :
- Pourquoi certains signaux ont besoin de filtrage
- Quels sont les principaux types de filtres et leur caractéristiques
- Comment fonctionnent un filtre passe-bas
- D’où provient le délai induit par le filtrage
- Quelle stratégie de filtrage adopter avec les versions récentes de Betaflight
- Quelle démarche adopter pour optimiser le filtrage d’une machine
Liens utiles
- Vidéo de Ivan sur le filtrage
- Simulateur de Ivan
- Blackbox Explorer
- PIDtoolbox
- Chaîne de Chris – Flat FPV
- Chaîne des Bandolovers
Les sujets abordés
Dans cet épisode, nous discutons des aspects suivants :
- Le filtrage, ça sert à quoi ?
Les différents problèmes réglés par le filtrage - Introduction aux filtres
Leurs origines - Caractéristiques d’un filtre
Aperçu d’un principales caractéristiques des filtres - Les différents types de filtres
Revue des type de filtre, du passe-bas aux coupe-bande - Fonctionnement des filtres passe-bas
Algorithme simplifié, démos - Filtres disponibles dans Betaflight
Passage en revue des différents filtres disponibles dans Betaflight - Stratégie de filtrage
Quelle stratégie mettre en place - Cas pratiques de filtrages
Etude de cas pratiques
Les points à retenir
La vidéo contient énormément d’informations, théoriques comme pratiques. Si la vidéo est trop longue et que vous ne vous intéressez qu’à la partie pratique liée à Betaflight, vous pouvez regarder la vidéo à partir de :
- 31:46 pour les explications concernant Betaflight
- 49:07 pour les cas pratiques d’optimisation
Ce qu’il faut globalement retenir :
- Les filtres lissent le signal et atténuent les fréquence parasites (vibrations…)
- Les filtres ajoutent du délai et le délai amplifie le prowash
- On veut le minimum de filtrage pour avoir le moins de délai possible tout en conservant un signal propre
- Les filtres notches (coupe-bande) ciblent les pics de bruit sur une bande de fréquences étroite
- Les filtres passe-bas ciblent le bruit après une fréquence donnée (fréquence de coupure, ou « cut-off« )
- Plus la fréquence de coupure est basse, plus on ajoute de délai
- Evitez les filtres avant ~100Hz, le drone risquerait d’avoir un comportement anormal, voire dangereux (ce conseil ne s’applique pas forcément aux grosses machines > 8″, où il est parfois nécessaire de filtrer à des fréquences plus basses)
- PIDToolBox est ultra puissant mais aussi assez complexe
- Blackbox Explorer est souvent largement suffisant
- Faites confiance à Betaflight concernant la stratégie de filtrage
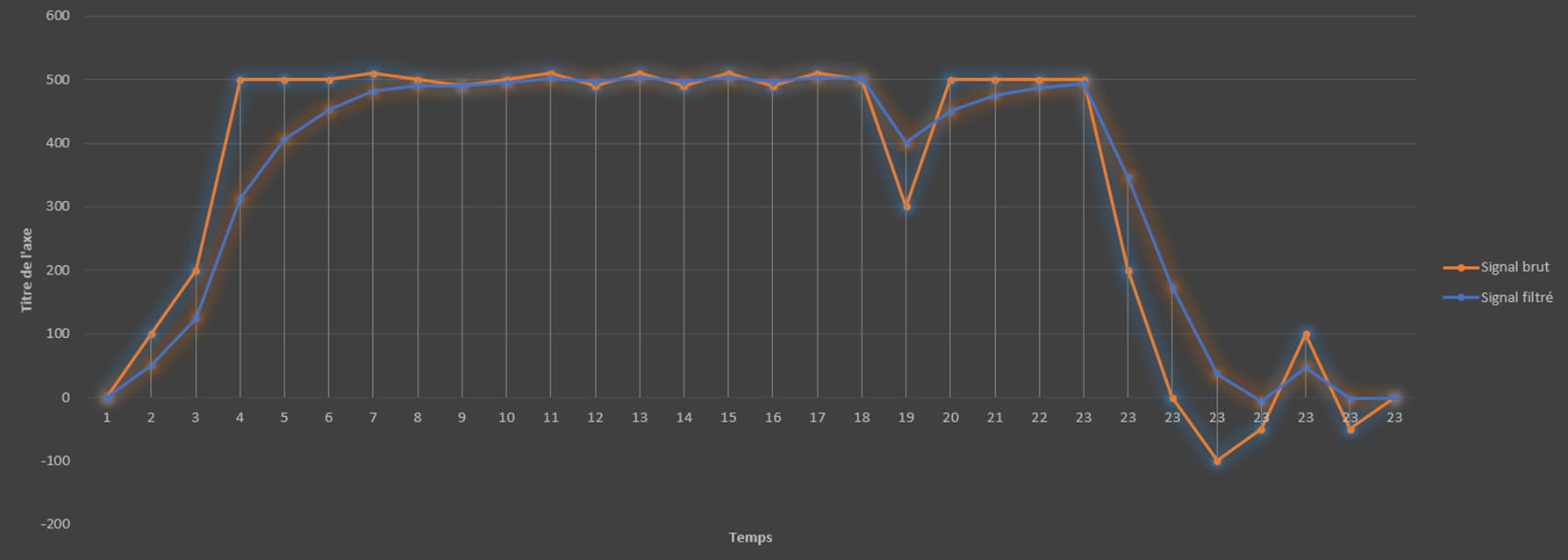
Exemple de lissage :
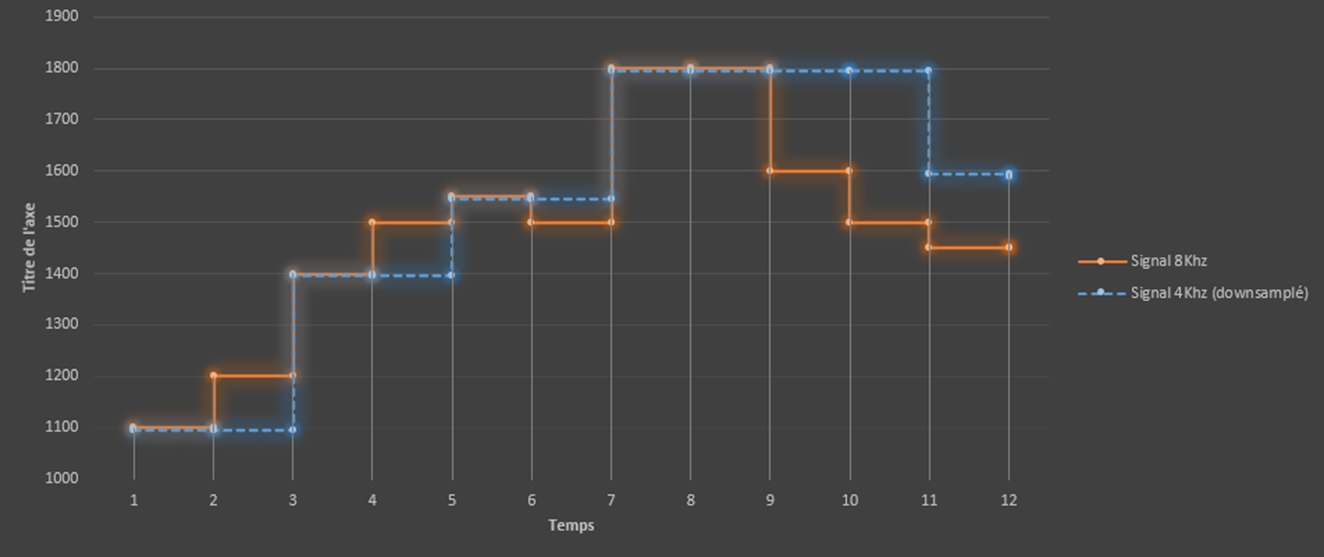
Exemple d’anticrénelage :
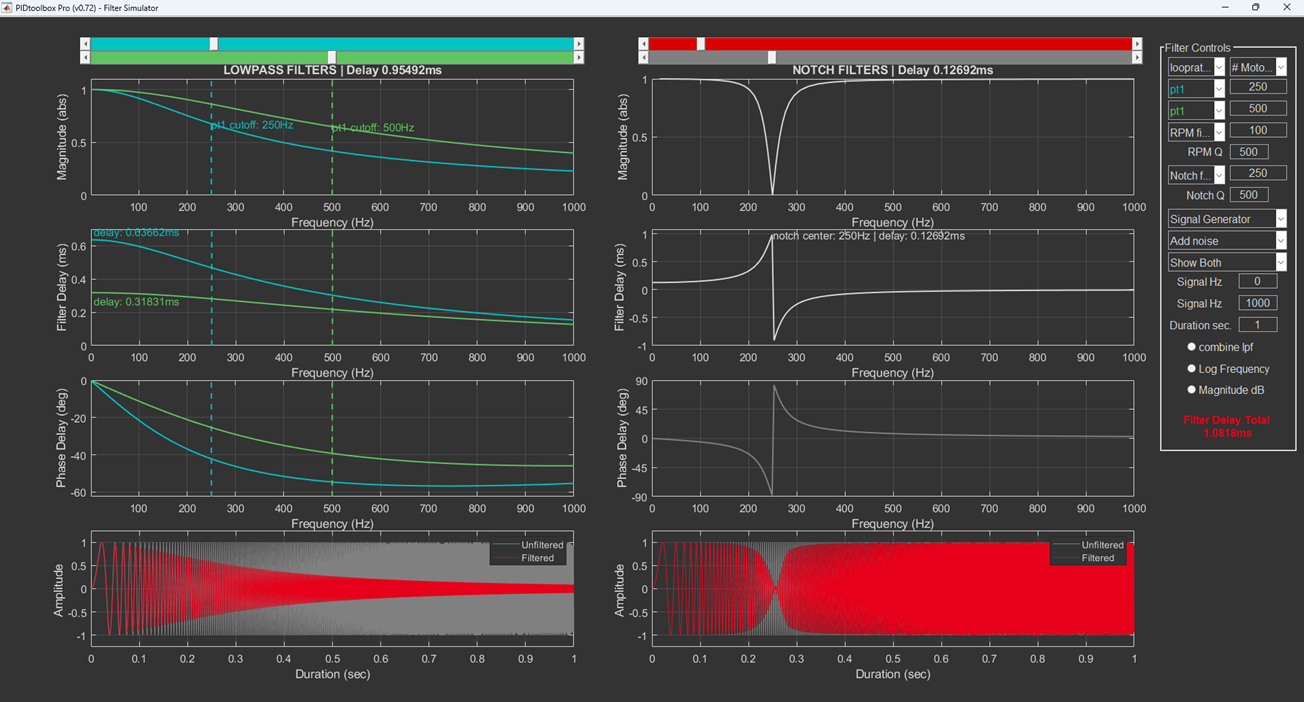
Comparaison filtre passe-bas versus filtre coupe-bande :