
BetaFlight 4.2 est disponible en Release Candidate 1 depuis une semaine déjà. Je n’ai pas eu le temps de m’y pencher mais j’ai trouvé la vidéo ci-dessous de Joshua Bardwell plutôt instructive. Il y explique les 5 nouveautés les plus « surprenantes » de ce nouveau firmware. Du coup, je vous la partage et je vais tenter de la résumer en français. Vous pouvez aussi découvrir tous les changements de cette RC1 par rapport à la version 4.1.6 sur le GitHub officiel de BF.
Présentation de BetaFlight 4.2 par JB
Calibration obligatoire de l’accéléromètre
Si vous souhaitez utiliser l’accéléromètre d’un contrôleur de vol sous BetaFlight 4.2, vous serez obligé de le calibrer. En effet, on ne peut pas avoir confiance à 100% dans la calibration d’usine. Du coup, si vous souhaitez voler en mode stabilisé (angle ou horizon), vous ne pourrez pas armer tant que le capteur ne sera pas calibré.

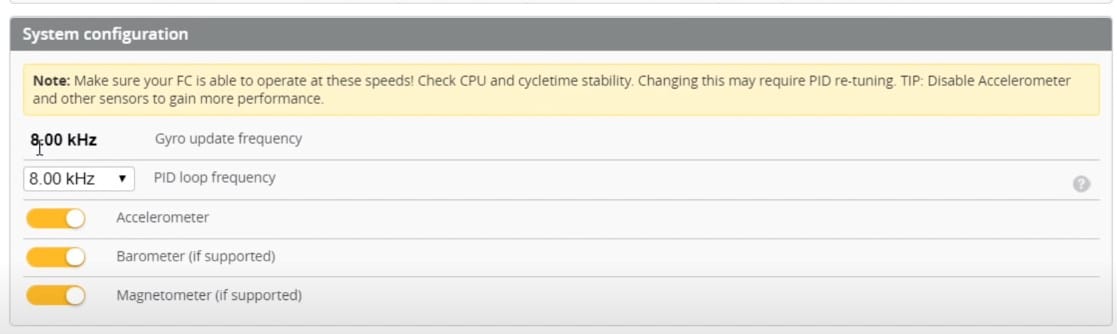
Fréquence du gyroscope verrouillée
Alors que FalcoX et EmuFlight continuent de « promouvoir » le 32kHz, BetaFlight tend à réduire la fréquence de rafraîchissement du gyroscope comme Kiss. En effet, par défaut BetaFlight va bloquer la fréquence du gyro à la vitesse native de ce dernier (cela dépendra donc du modèle). Pour faire simple, cela permet de conserver un signal le plus précis possible en évitant notamment le phénomène d’aliasing. En conséquence, le RPM filter est encore plus performant ! Tous les « travaux » effectués sur les fréquences, le filtrage et l’ordonnancement sont décrits dans ce commit.
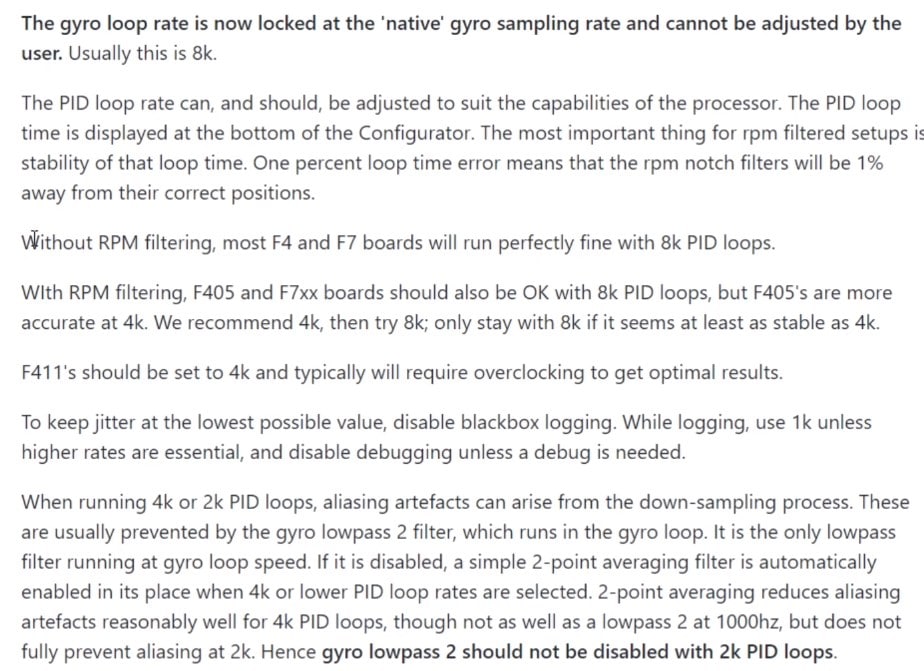
La PID loop limitée en fonction du protocole moteur utilisé
Toujours dans l’optique de limiter les erreurs dans la transmission des données, la boucle PID doit être réglée en fonction du protocole utilisé pour les ESCs et de la puissance de calcule du contrôleur de vol. Par exemple, vous pouvez oublier la boucle à 8kHz avec un processeur F4 si vous voulez utiliser le RPM Filter. Avec un F7 la stabilité doit tout de même être testée.
Si vous êtes en DShot c’est pareil. Vous devez adapter la vitesse de PIDs en fonction de la vitesse du DShot et de l’usage de l’option « Bidirectional » :
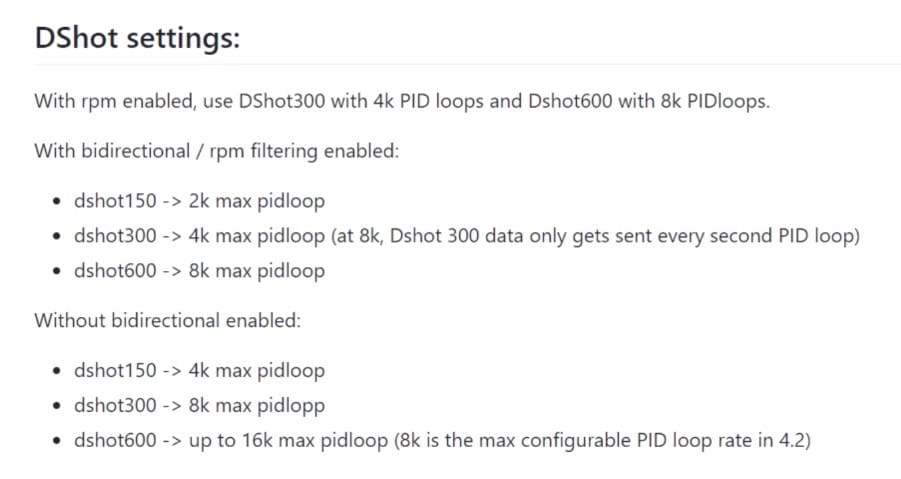
Tout cela peut paraître restrictif mais il faut garder en tête que c’est pour fiabiliser les protocoles et ainsi améliorer les performances en vol.
Différents types de rates
BetaFlight 4.2 permet désormais de choisir son type de rates (à ce sujet, n’hésitez pas à jeter à œil à ce topic sur le forum), à savoir entre BetaFlight classique, RaceFlight/FlightOne/FalcoX, Kiss et les nouveaux rates BetaFlight (Actual). Les QuickRates permettent de migrer ses anciens rates (BF) dans le nouveau format (Actual).

Les nouveaux rates permettent de régler la sensibilité des sticks au centre et à leurs extrémités. L’expo permet ensuite de modifier la forme de la courbe entre ces 2 points.
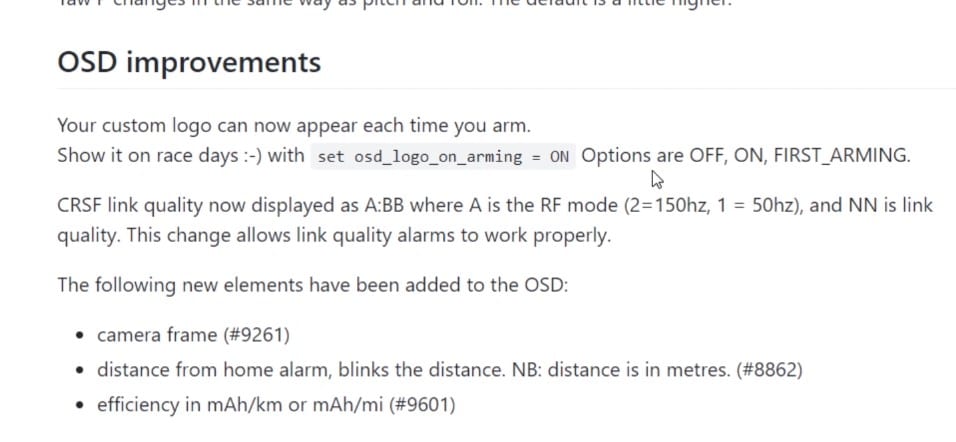
Afficher un logo à l’armement du quad
Cette fonctionnalité n’est pas activée par défaut. Pour afficher une image personnalisée à l’armement du drone, il faut passer en CLI et taper la commande suivante :
set osd_logo_on_arming = on
Il faut également télécharger le logo au bon format sur le contrôleur de vol via le menu de configuration de l’OSD :
Pour tester cette fonctionnalité il faut absolument que la LiPo soit branchée (et les hélices d’enlevées si vous êtes en intérieur). La puce de l’OSD n’est en effet pas alimentée par l’USB.
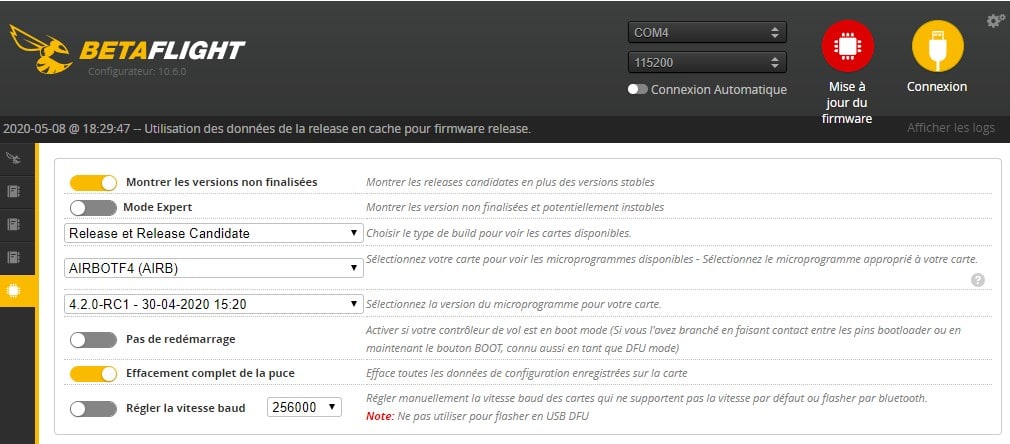
Comment installer BetaFlight 4.2 ?
Il suffit d’activer les versions non finalisées dans BetaFlight Configurator ou de télécharger directement la target qui vous correspond ici.
Une fois que vous avez flashé BetaFlight 4.2, il faut également installer BetaFlight Configurator 4.2 que vous pouvez télécharger ici.
Le tuning sous BetaFlight 4.2 ?
Si vous souhaitez vous lancer dans le PID Tuning sous BF 4.2, n’hésitez pas à consulter les conseils officiels des développeurs.














Merci bro pour cette nouveauté et cet article
Au top comme d’hab
Merci =)
Belle présentation,
Malheureusement je trouve que l’on est pas encore au point sur les versions précédentes, par exemple, la table des frequences a saisir depuis la 4.1.
Alors passer en 4.2 ca me parait précoce
@KEKEFFF : Une fois que t’as compris comment ça marche c’est pas compliqué la table de fréquence, et c’est dans l’esprit de laisser le pilote maître de son matériel. Au lieu de devoir faire confiance au constructeur du VTX tu peux maintenant customiser toi même tes fréquences et puissances, je vois pas en quoi ce n’est pas au point pour moi 🙂
Salut motar geek et autres…
Je dispose d’un petit racer Moby X2, il fonctionnait très bien mais voilà que ma stupidité là emporté;
J’ai voulu le passé sous 4.2, c’est une carte F3 de HGLRC mais plus de Gyroscope et je suis paumé.
Merci à quiconque pour un retour.
T’as sauvegardé la configuration BF pour faire machine arrière ?