

Vous êtes plusieurs à l’attendre sur le forum et contre toute attente, la version 1.3 de Kiss pointe déjà le bout de son nez en BETA. Je pense que c’est lié aux problèmes que rencontrent les possesseurs de Kiss CC en version 1.2, moi le premier. En effet, à partir du moment où j’ai mis à jour mon QQ130 en 1.2 je perdais régulièrement le contrôle en vole ! C’était à priori un problème de bruit en réception sur le port série conjugué à un contrôle CRC trop faible.
Heureusement, j’ai pu mettre la main sur la beta privée qui fonctionne très bien. DaD vole également avec cette version depuis quelques temps (pour tester le contrôle de son émetteur vidéo TBS Unify) et il n’a rencontré aucun problème.
De plus, cette version apporte son lot de nouveautés des plus intéressantes !
Les grosses nouveautés de Kiss 1.3
Une looptime paramétrable !
La boucle PID n’est plus bloquée à 1khz (1000us). On peut la paramétrer à 2 voire 4khz. Je n’ai personnellement pas testé, faute dire que ça vole tellement bien en 1k… Même si on est loin des 32k de RaceFlight.
Support du Smart Audio pour TBS Unify
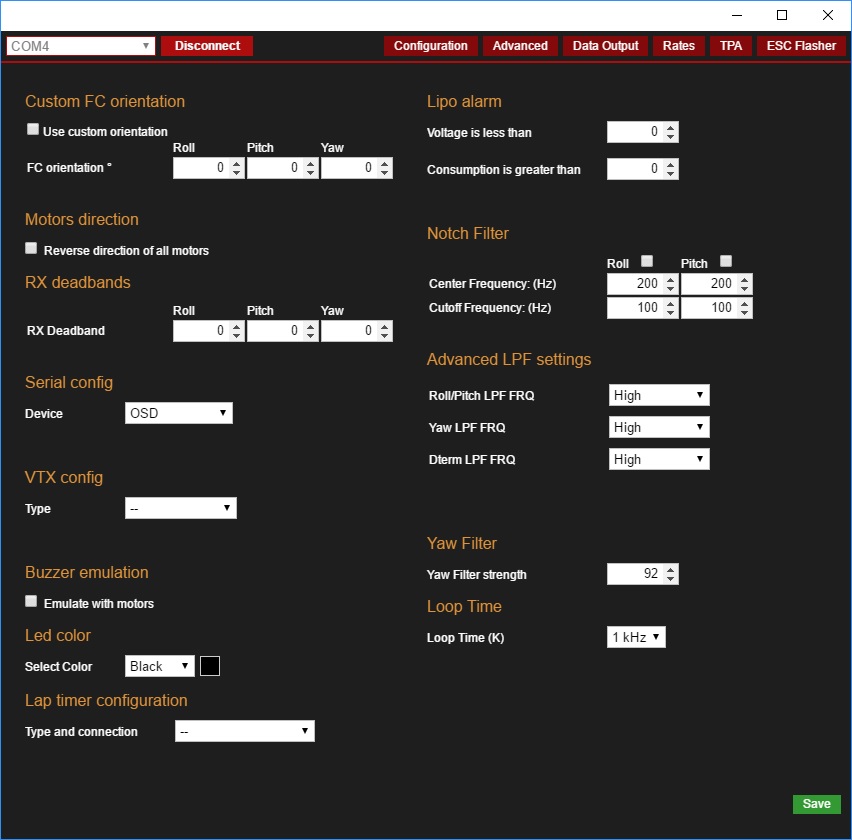
Plus de jaloux, les vTx Tramp et TBS sont désormais tous les 2 supportés par Kiss pour les paramétrer via OSD ou Taranis. La connexion s’effectue par contre par le port RX3 de la carte. Ceux qui ont câblé leur Tramp en TX2 pour la version 1.2 vont donc devoir jouer du fer à souder.
Sachez que c’est pour la bonne cause. En effet, ils ont « scindé » un port UART full duplex en 2 ports half duplex (je vous laisse lire cette documentation très explicite sur les canaux de communications duplex). Il en résulte qu’on peut utiliser un OSD et la télémétrie de l’émetteur vidéo en même temps. Par contre, la BlackBox partage toujours le port de l’OSD. C’est moins gênant puisque c’est un besoin normalement ponctuel.
Changement du sens de rotation des moteurs dans l’interface de configuration
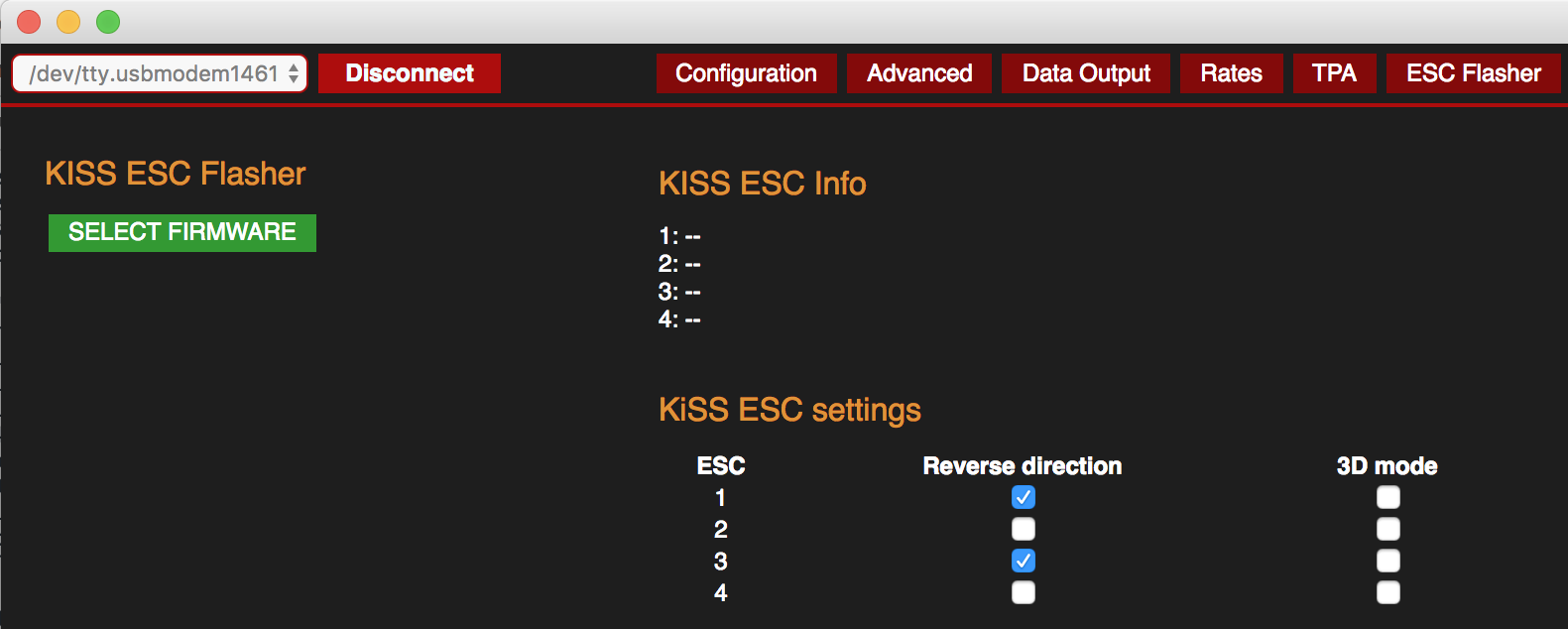
Plus besoin de souder (le jumper ou les câbles moteurs) sur les ESC Kiss 24A Race Edition pour changer le sens de rotation des moteurs. Les autres ESC sont exclus bien évidemment…
A noter que l’activation du mode 3D se fait désormais dans cet onglet lui aussi.
Changer le sens de rotation de tous les moteurs
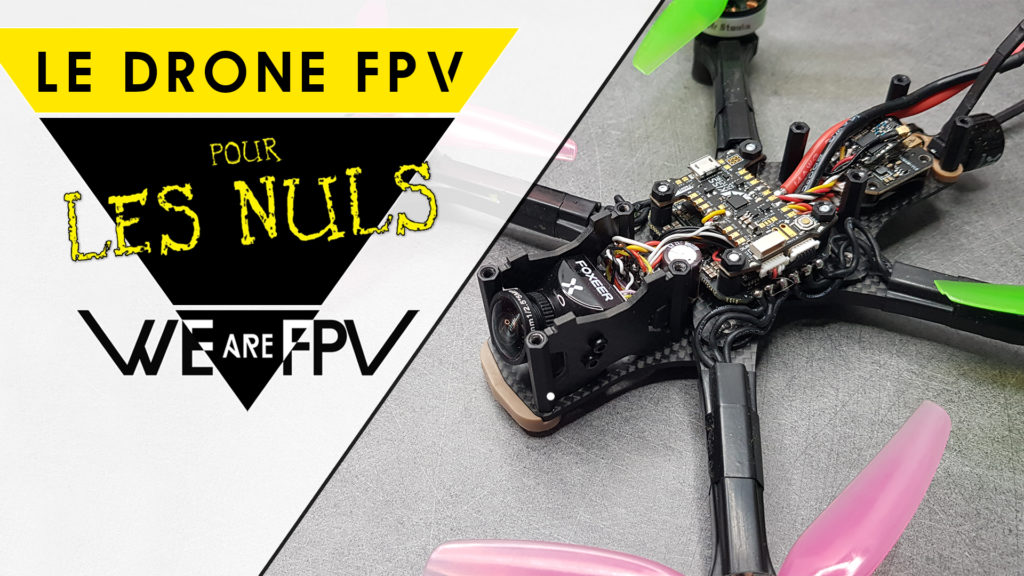
 La rotation des 4 moteurs vers l’extérieur est un sujet tendance sur le forum. Ça permet principalement d’éviter d’envoyer des crasses et gouttes d’eau sur l’optique de la caméra FPV (au détriment de l’électronique) pour un comportement en vol à priori similaire. Pour voler ainsi sous Kiss il suffit désormais de cocher l’option qui inverse la direction du YAW.
La rotation des 4 moteurs vers l’extérieur est un sujet tendance sur le forum. Ça permet principalement d’éviter d’envoyer des crasses et gouttes d’eau sur l’optique de la caméra FPV (au détriment de l’électronique) pour un comportement en vol à priori similaire. Pour voler ainsi sous Kiss il suffit désormais de cocher l’option qui inverse la direction du YAW.
Les changements mineurs de Kiss 1.3
- Le filtre YAW passe de 92 à 35 en valeur par défaut
- Support TBS crossfire avec les scripts LUA
- Nouveau protocole CRC (Les OSD non Kiss peuvent ne pas fonctionner avec et nécessiter une mise à jour du code)
- Correction du bug de réinitialisation des réglages en vol…
- Séparation du filtre passe bas sur les 3 axes (roll, pitch et yaw)
- Amélioration du module Wi-Fi
- Optimisation des scripts LUA
Si l’expérience beta vous dit c’est ici que ça se passe 😉














hello, motard geek 🙂
je suis passe de kiss 1.2 a 1.3 pour pouvoir réglet mon tbs
malheureusement en suivant ton tuto ca ne fonctionne pas 🙁
le script a mettre entre KissCF.lua ou KissSP.lua ou bien mettre les 2 lol
que j’ai fait d’ailleurs toujours rien
j’ai bien déplacer mon fils smartaudio sur le port RX3
si tu pouvais m’aider je te serrai reconnaissant :)))
merci
KissCF = CrossFire et KissSP = Smart Port (FrSky), faut mettre le bon.
T’as bien actualisé les capteurs si t’es sous OpenTx (version 2.2.X minimum).
donc pour moi kissSP car je suis en frsky smart port
j’ai bien actualisé les capteur 🙂 car tu m’avais déjà données un coup main pour la 1.2 qui a fonctionner :))
par compte la je suis bien en 2.2RC18 opentx
Et dans la conf de la Kiss FC, onglet avancé, t’as bien mis Tramp HV ?
c’est bon tout fonctionne !!!!! trop prés du drone avec la radio 🙂
non j’ai un tbs comme vtx 🙂
merci beaucoup pour ton aide
Ah oui j’y ai pas pensé…