

Le temps passe vite : ça fait déjà près d’un an que la version 4.4 de Betaflight est sortie ! Et aujourd’hui, c’est Betaflight 4.5 qui pointe le bout de son nez.
Comme à chaque nouvelle version majeure, on va passer en revue les principales nouveautés et répondre aux questions que vous pourriez vous poser.
Vidéo découverte et mise à jour de Betaflight 4.5
Introduction
Comme à chaque fois, la version contient énormément d’améliorations diverses, de corrections de bugs et de nouvelles fonctionnalités. On va rapidement présenter les principales nouveautés, mais si vous voulez en savoir plus, n’hésitez pas à consulter les liens suivant :
- Les notes de mise à jour sur le site pour une description macro
- Les notes associées à la release de Betaflight Configurator 10.10.0 sur Github
- L’intégralité des Pull Requests concernant la 4.5 sur Github
Au moment de la rédaction de cet article, nous en sommes à la Release Candidate 2 de la version 4.5 de Betaflight.
Au passage : si vous volez en JeNo 5”, le preset pour la version 4.5 est dores et déjà disponible sur le repo WE are FPV.
La suite de l’article se concentrera sur les nouveautés, mais la vidéo montre comment faire la mise à jour sur un quad en 4.4.
Pré-requis
Comme souvent quand le firmware passe sur une nouvelle version majeure, il faut aussi mettre à jour le reste de l’écosystème Betaflight.

La principale brique logicielle étant Betaflight Configurator, c’est lui qui va nous permettre de flasher et configurer ce nouveau firmware. Il passe en version 10.10.0.
Si vous utilisez les scripts LUA, il peut être nécessaire de les mettre à jour également. Malheureusement, au moment de la rédaction de cet article, je ne sais pas encore si une nouvelle version sera distribuée.

Enfin, et on en reparlera dans quelques instants, il faudra mettre à jour BlackBox Explorer pour profiter des dernières nouveautés, du moins si vous l’utilisez. La nouvelle version est la 3.7.
Avant toute chose, pensez à sauvegarder votre configuration pour pouvoir y revenir rapidement en cas de problème et tout simplement pour vous faciliter la vie lors de la migration. Soit en faisant un “diff all” soit en passant par l’écran des presets.
Nouveautés
Flash
L’écran de mise à jour du firmware contient déjà quelques nouveautés :
- Le système de Cloud Builds a été amélioré, même si ce n’est pas visible directement dans l’interface. Sur les précédentes versions, après un flash, on devait appliquer la configuration de la FC lors de la première connexion. Ce n’est plus nécessaire, probablement pour éviter les loupés.
- Le protocole CRSF (qui vaut pour ELRS) est sélectionné par défaut,
- Les options de télémétrie sont désactivées pour les protocoles qui l’intègre déjà comme le CRSF, Ghost ou le F.Port.
Interface
Il y a eu plusieurs petites évolutions au niveau de l’interface même du configurateur:
- Plus d’infos sur l’onglet Setup, avec notamment la température du CPU
- L’icône du GPS indique l’état du fixe (il apparaît en rouge si pas de fix)
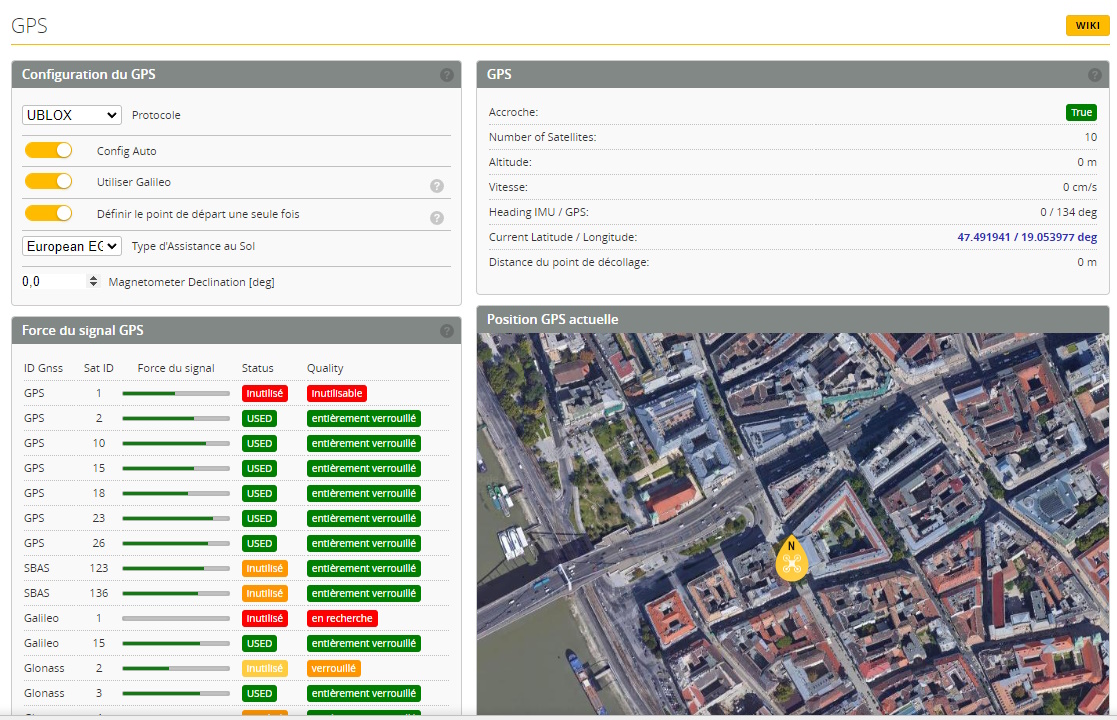
- La config GPS migre logiquement vers l’onglet GPS
- De manière globale, l’onglet GPS a été revu et enrichi (nouveau design pour la qualité/statut du signal, l’ajout d’une carte etc.)
- La valeur du Dynamic Idle est rappellée dans l’onglet moteurs (on continue de la configurer dans l’onglet PID)
- Ajout de la moyenne des RPM de tous les moteurs dans onglet « Moteurs » si le DShot Bidirectionnel est activé
- Il est maintenant possible d’activer plusieurs « repositories » de presets en même temps
- Blackbox : choix des données à tracer, en particulier avec l’ajout des données GPS
Support MCU AT32
L’une des principales nouveautés de Betaflight 4.5, c’est le support des microcontrôleurs AT32 de chez ArteryTek. On y a consacré une vidéo complète il y a quelques mois.

Pour rappel, les AT32 F435 offrent des performances très similaires aux F7 de chez STMicroelectronics. Avec un plus faible encombrement mais surtout, ils coûtent nettement moins cher. Et comme ils sont beaucoup moins utilisés, ils seront moins sujets aux pénuries.
Le support de ces nouveaux microcontrôleurs est une excellente nouvelle, il reste maintenant à voir si les constructeurs vont s’y mettre pour nous proposer du matériel un peu moins cher.
GPS
L’autre gros morceau de cette mise à jour concerne le GPS !
La 4.4 avait déjà apporté son lot de nouveautés, avec notamment la réécriture complète du GPS Rescue, qui devenait un vrai RTH. Mais elle avait aussi introduit quelques bugs. Betaflight 4.5 apporte pas mal de choses à ce niveau :
- Comme on l’a vu plus haut, l’onglet GPS a été complètement revu
- Le support des GPS M10 a été amélioré, ils devraient être plus fiables et plus performants
- Le RTH a encore été amélioré
- Les magnétomètres (boussoles) sont bien mieux gérés qu’avant
- La fonctionnalité GPS Lap Timer, pour les racers, permet de chronométrer ses tours sans avoir besoin de matériel supplémentaire
- Enfin, on peut maintenant intégrer les données GPS dans la Blackbox ! Dans Blackbox Explorer on peut directement visualiser notre trace GPS en temps réel. Et on peut la capturer pour l’intégrer facilement à une vidéo.
- Pour aller encore plus loin, on peut exporter les données GPS dans un fichier GPX standard que l’on pourra ouvrir dans différents logiciels comme Google Earth par exemple. Pour illustrer ça, je vous mets en surimpression une vidéo qui intègre la carte 2D de Blackbox Explorer mais aussi une extrapolation 3D générée avec Google Earth.
Comportement du quad
Il n’y a pas de modification majeure au niveau du comportement du quad en vol, mais il y a tout de même 2 ou 3 petites nouveautés sympathiques :
- Low Throttle TPA : quand on a un quad avec un tune assez poussé et des D élevés, le quad peut faire la « sauterelle » à l’armement, avant de décoller. Le TPA dans le bas des gaz va permettre de limiter les PIDs tant que le quad n’a pas décollé, et donc limiter cet effet “sauterelle”. Cette nouvelle fonctionnalité est activée par défaut et peut être ajustée via le CLI.
- EZ Landing : dans la même idée, le EZLanding qui va faciliter l’atterrissage, même quand le Air Mode est activé. Quand on a l’habitude, on sait désarmer au bon moment, mais quand on a moins d’expérience, le drone peut avoir tendance à rebondir en touchant le sol lorsque l’on veut atterrir. Cette fonctionnalité va réduire les PIDs lorsque les gaz sont bas et que les sticks sont centrés. Par contre, cette fonctionnalité est désactivée par défaut. Pour l’activer, ça se fera aussi en ligne de commande via le CLI.
- Filtre RPM Ajustable : via CLI on peut ajuster la force du filtre sur chaque harmonique, ça peut permettre de gagner un peu en latence. Il y a d’autres moyens de réduire la latence sur ce filtre avant de devoir utiliser cette fonctionnalité. En jouant sur le facteur Q ou en réduisant le nombre d’harmoniques par exemple. Par contre, il va permettre, si le besoin s’en fait sentir, de complètement désactiver le filtrage de la seconde harmonique tout en gardant la 3ème. J’ai hésité à en parler, l’utilisation de cette fonctionnalité sera sans doute assez marginale.
Course
Sur cette mise à jour les raceux ne sont pas en reste. Les développeurs ont pensé à eux avec plusieurs options de compilation que l’on pourra ajouter au firmware :
- GPS Lap Timer : on en a déjà parlé, ça permet de chronométrer des tours pour faire des circuits n’importe où et sans équipement spécifique
- RPM limiter : va permettre de limiter les RPM des moteurs. Contrairement à la limite moteur qui fixe un pourcentage pour chaque moteur, le RPM limiter agit sur les RPM moyens pour l’ensemble des moteurs. Très pratique pour le “spec racing” (qu’on pourrait traduire par “course en spécifications identiques”), où tout le monde concourt à armes égales : que ça soit avec des machines physiquement identiques ou dont la puissance est bridée de manière égale par le firmware
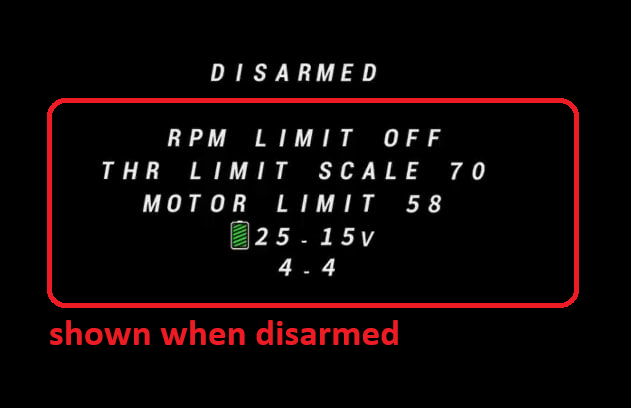
- Toujours dans une optique de spec racing, on peut ajouter une option de compilation pour afficher certains réglages dans l’OSD jusqu’à l’armement. Ca permettra aux organisateurs de course de vérifier la configuration des pilotes.
- Kaaak mode : qui permet de voir combien de temps on est resté full gaz, et ça indique Kaaaak dans l’OSD quand on est en full.
- Quick OSD : ajoute une page à l’OSD qui regroupe tous les réglages utiles en race
Modes stabilisés
Il y a aussi eu une refonte complète des modes stabilisés ANGLE et HORIZON. Ces modes seront beaucoup plus agréables et optimisés. Par défaut, le YAW ne suivra plus l’inclinaison du quad mais prendra comme référence le sol. La bonne quantité de roll sera automatiquement ajoutée pour garder l’horizon à plat.
On vous laisse lire les notes de mise à jour sur Betaflight 4.5 si vous voulez en apprendre plus sur ce sujet.
Est-ce qu’il faut faire la mise à jour ?
La question est toujours la même : est-ce qu’il faut passer sur Betaflight 4.5 ? Parce qu’évidemment, il n’y a rien d’obligatoire.
Il y a 2 écoles. Ceux qui vous diront “si ça marche, ne touchez à rien”, et ça se tient, surtout si aucune des nouveautés de la version ne vous intéresse.
Je suis plutôt de l’autre école, je préfère suivre les mises à jour. En plus des nombreuses nouveautés, il y a beaucoup d’améliorations et de corrections de bugs, la liste est vraiment longue. Au final ça fait pas mal de choses susceptibles d’améliorer un peu le comportement du drone, quelques exemples :
- Plusieurs corrections qui améliorent la stabilité du protocole DShot
- Optimisation de la télémétrie des ESCs qui corrige notamment des petits soucis du Dynamic Idle
- Optimisation de la gestion de certains gyros comme le MPU6000, le ICM-42688-P ou le ICM42605
- Des corrections de bugs et des améliorations pour les H7
- Optimisation au niveau du filtrage
- Optimisation du Feed Forward et du RC Smoothing
- Et bien d’autres choses
On peut voir que près de 500 Pull Request ont été créées pour cette version 4.5 ! Cela illustre bien l’ampleur du travail que représente une version majeure de Betaflight. Cela montre aussi la quantité de petites corrections réellement portées par cette mise à jour. C’est loin d’être anodin.

De même que la montée de version n’a rien d’obligatoire, elle n’a rien d’urgent non plus. Vous pouvez laisser passer quelques semaines. Ou même attendre la prochaine mise à jour mineure pour ne pas risquer d’essuyer les plâtres.
Même s’il y aura toujours des bugs, on est tout de même beaucoup à voler sur Betaflight 4.5 depuis des mois sans rencontrer de problèmes majeurs. Et davantage encore à avoir testé les releases candidates depuis plus d’un mois.
Conclusion
On a fait le tour des principales nouveautés qui vous attendent avec cette version. Si vous voulez aller plus loin et approfondir certains sujets, n’hésitez pas à suivre les liens qui accompagnent cet article.














Salut , j’ai un souci après les mises à jour vers 4.5, l,onglet OSD disparaît de betaflight ainsi que l’osd sur les lunettes .
Du coup je reviens sur la version 4.3 et tout fonctionne normalement.
Quelqu’un a une idée pour résoudre le problème.
Bien sûre j’ai testé sur plusieurs drone , stack de marque différente, nouvelle version betaflight…etc
Salut,
Tu devrais ouvrir un topic dans le forum Entraide du forum ou passer sur le Discord, tu auras plus de chance d’avoir des réponses.
En attendant, assure toi d’avoir bien sélectionné l’option de build « OSD » au moment du flash de la FC et que la fonctionnalité « OSD » a bien été activée dans l’onglet « Configuration ».
Il faut également disposer de la dernière version du configurateur (10.10.0)
Merci pour la réponse, Je vais réessayer demain pour voir si ça fonctionne