L’importance des courbes RC
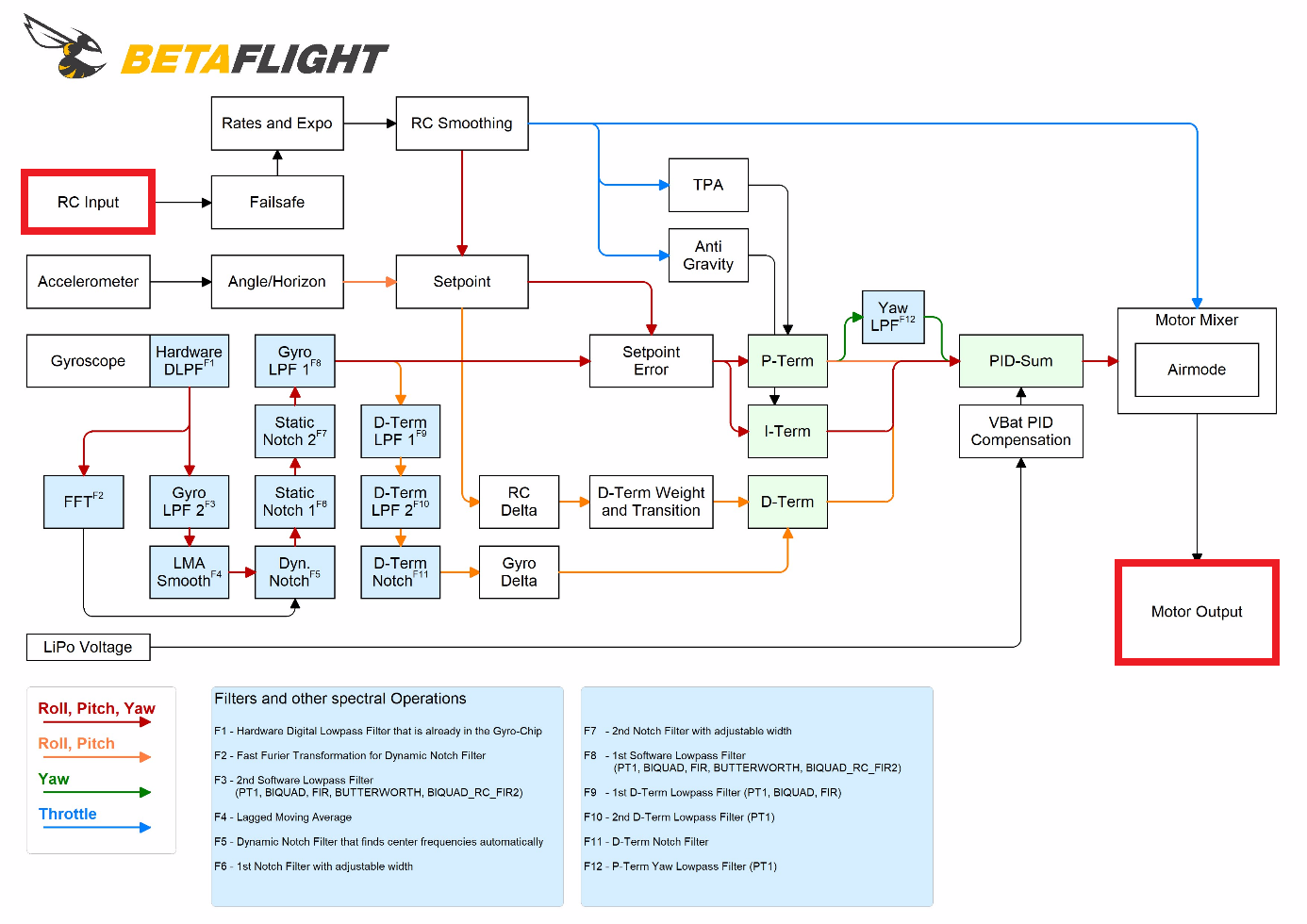
La qualité des courbes reçues par votre Rx (récepteur radio) qui peut être améliorée par le RC Smoothing est absolument primordiale pour le reste de l’exécution des filtres, boucle PID et autres. J’en veux pour preuve le parcours que doivent ensuite faire ces informations. Si votre RC Input est de mauvaise qualité, je vous laisse imaginer ce que cela donnera en sortie :
INTERPOLATION vs FILTER
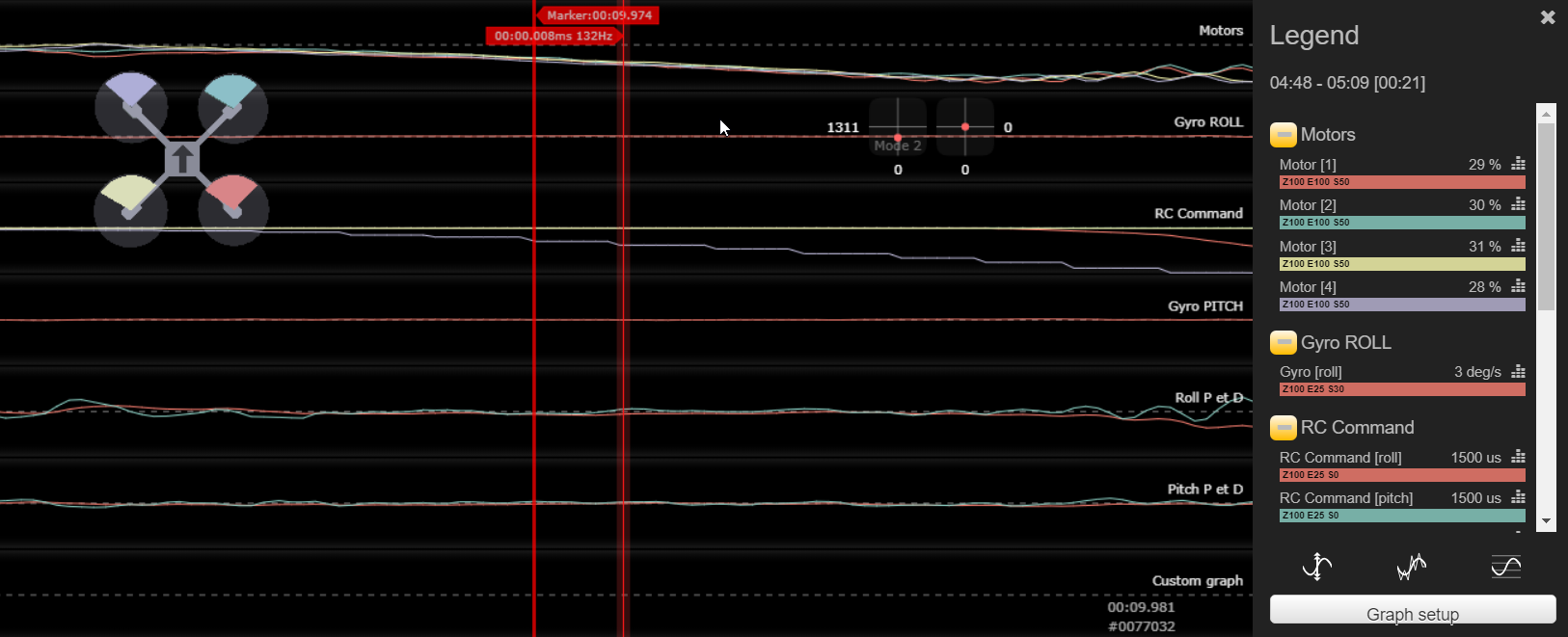
Pour vous donner un ordre d’idée de la qualité du RC Input avec les paramètres par défaut de BetaFlight (RC Smoothing = Interpolation avec option AUTO, FrSky QX7, R-XSR et 8 canaux actifs sur la radio), voici un extrait de log blackbox des RC Commands :


Comme vous pouvez le constater, les courbes sont en forme d’escaliers. Et elles seront amplifiées une fois arrivées aux moteurs !
Mais pourquoi ces courbes sont-elles en forme d’escalier..??
Pour faire simple, votre radio récupère la position de tous les inters et sticks, puis les envoie à votre Rx. Ce temps de récupération d’informations est directement dépendant du nombre de canaux activés et du protocole (Crossfire, FrSky, etc…). Plus vous avez de canaux actifs (assignés ou non), plus il va falloir de temps à votre radio pour en lire l’état. Donc, entre chaque envoi d’information, le Rx garde la dernière valeur envoyée jusqu’à recevoir la nouvelle. A noter ici qu’il y a du RC Smoothing ! Imaginez sans…
Pour vous donner une idée, voici le temps de latence du protocole FrSky en fonction du nombre de canaux actifs :
16ch actifs => latence de 22ms
8ch actifs => latence de 8ms
4ch actifs => moins de 8ms
RC Smoothing, les réglages BetaFlight
Sinon… Depuis BetaFlight 3.4, le RC Smoothing peut se faire en mode « Interpolation » (avec les options MANUAL ou AUTO) ou en mode « Filter ».
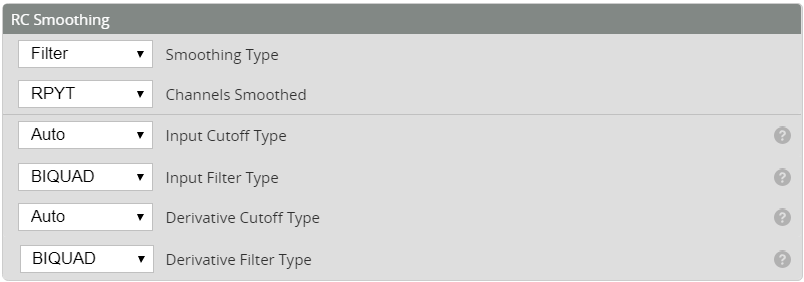
Je vous recommande ce mode avec les options ci-dessus. Ce nouveau mode permet une bien meilleure gestion du RC Smoothing, et donc des courbes plus belles. Il permet de calculer en temps réel le frame rate, et en déduit :
- L’active input cutoff
- L’active derivative cutoff
- Le type de filtre (BIQUAD/PT1)
Votre quad vous en remerciera et vous pourrez aller plus loin dans le réglage de vos PID.
Pour aller plus loin…
La vidéo de UAV TECH sur la différence entre le RC_Smoothing INTERPOLATION et FILTER vaut le coup d’œil :

Just high five your nearest neighbor and happy flying !