

L’hiver arrive, et avec lui la saison des Tiny Whoops ! Cette année, BetaFPV nous propose son whoop le plus léger : avec seulement 17 grammes sur la balance, le BetaFPV AIR65 promet des performances exceptionnelles. On a donc ressorti nos lunettes analogiques pour lui faire subir un test intensif. On partagera avec vous nos impressions, nos réglages, nos optimisations et notre avis global à son sujet !
- 1 Review du BetaFPV AIR65 en vidéo
- 2 Attention
- 3 Contexte
- 4 Unboxing et éditions : Race vs Freestyle vs Champion
- 5 Le BetaFPV AIR65 : caractéristiques
- 6 Logiciels et blackbox avec le AIR65
- 7 Mise en route du AIR65
- 8 Optimisations logicielles pour le BetaFPV AIR65
- 9 Retour d’expérience sur le BetaFPV Air65
- 10 Les défauts du BetaFPV AIR65
- 11 Conclusion au sujet du BetaFPV AIR65
- 12 Acheter le BetaFPV AIR65
Review du BetaFPV AIR65 en vidéo

Attention
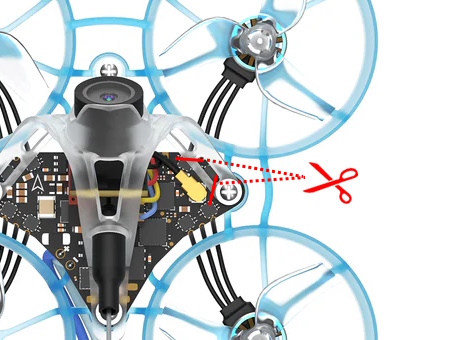
Sur les premiers modèles, le bord de la canopy était en butée du connecteur µ.FL de l’antenne VTX. Lors de chocs, il pouvait arriver que le connecteur soit arraché de la FC. Depuis, BetaFPV a modifié les drones livrés en sectionnant la partie de canopy problématique.
Mais attention, ce n’est pas forcément le cas sur la canopy de spare ou sur celles que vous achèteriez séparément. Si vous continuez à utiliser la canopy officielle, veillez donc à couper la partie indiquée sur l’image suivante :
Contexte
Il y a quelques années, je m’étais monté un Tina Whoop 3S, équipé d’un Vista. Il volait bien, mais à 84g (sans LiPo), il n’était pas des plus discrets. Et en intérieur, on n’aborde pas le freestyle de la même façon qu’avec un whoop 5 fois plus léger, les chocs pouvant être un peu violents sans réel danger.
La récente FC AiO incluant un VTX HDZero m’a donné à réfléchir. N’étant pas équipé en lunettes compatibles, la raison a pris le dessus et j’ai renoncé à dépenser 700€ pour des lunettes dédiées à un usage « whoop ».
Mais j’ai toujours mes DJI Goggles V1 avec une entrée analogique, que je trouve beaucoup plus confortables que les lunettes analogiques classiques, en particulier grâce à leur grand écran. Avec l’adaptateur DigiAdapter V2 de chez BDI et un vRX Eachine Pro58 (flashé en firmware Pirx), on a une solution relativement propre, agréable à voler et avec un bon DVR.

C’est dans ces conditions, que je suis revenu à l’analogique et que j’ai opté pour le BetaFPV AIR65. 17 grammes, ça vend du rêve ! Et du coup, c’est pas cher : une centaine d’euros sur Aliexpress et 113€ en France chez DFR ou La Camera Embarquée.
En plus du AIR65, je me suis équipé de l’excellent chargeur ViFly WhoopStor 3 dont on a récemment fait la review, ainsi que d’un extracteur d’hélices, un petit gadget très pratique !

Unboxing et éditions : Race vs Freestyle vs Champion
Contenu de la boîte :
- Le drone : BetaFPV Air65
- Set d’hélices de remplacement
- Canopy de remplacement
- Vis (moteur) de spare
- Un module USB-C avec son câble connecteur 4pins (le connecteur USB est donc déporté, pour gagner un peu en poids)

Le BetaFPV 65Air est disponible en 2 éditions, Race et Freestyle, ce qui se traduit par 2 différences :
- Moteurs 0702SE : 23000 KV pour la version Freestyle contre 27000 KV pour la version Race
- Hélices : HQ 31mm Ultralight pour la version Freestyle contre GF 1219S 3B pour la version Race
Le modèle testé ici est la déclinaison « Racing« . Elle devrait avoir un peu plus de peps grâce à ses KV plus élevés. Et surtout, quand j’ai commandé sur La Caméra Embarquée, c’était le seul modèle en stock.

Enfin, il existe une version « Champion » en édition limitée à 1000 exemplaires, avec les modifications suivantes :
- Moteurs 0702 II à 30 000KV
- FC AiO 5-en-1 : le RX est intégré à la FC (série !)
- Hélices : GF 1219S 3B
- + 0.3g
La version Champion n’était pas disponible en France quand nous avons commandé. Mais si vous y avez accès, n’hésitez pas, le RX intégré est intéressant. Les 30 000KV sont un bonus (vos LiPos ne seront pas forcément de cet avis ^^).
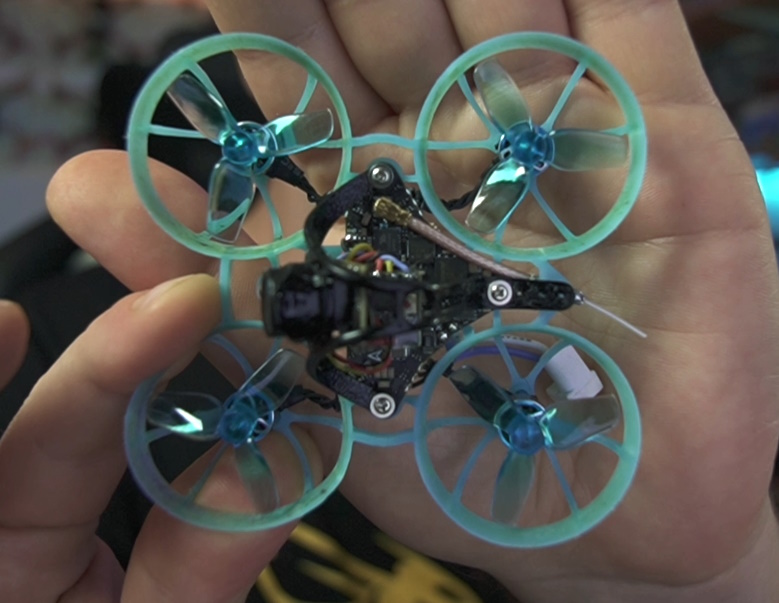
Le BetaFPV AIR65 : caractéristiques
Jetons un œil à ses principales caractéristiques :
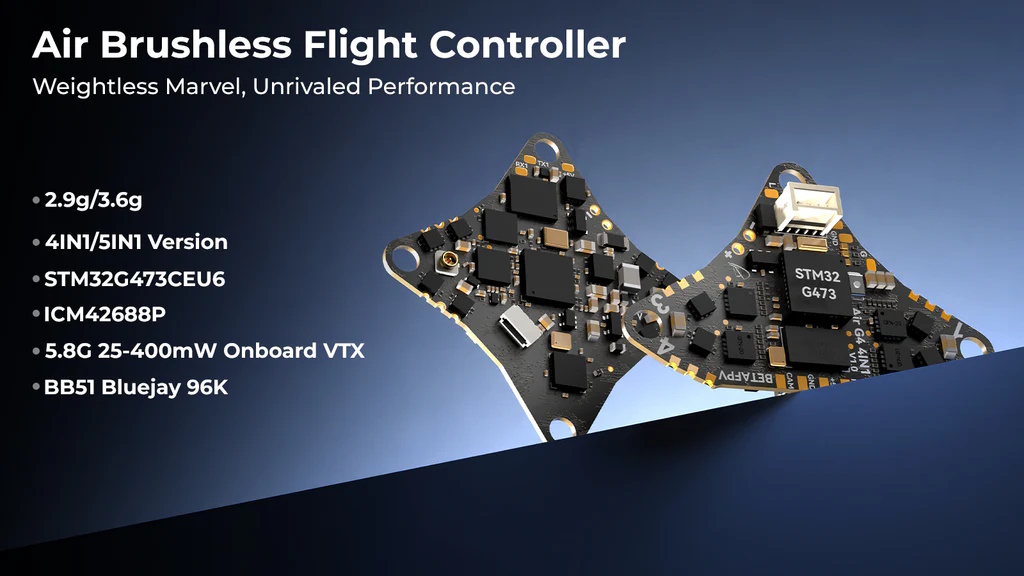
- Atout numéro 1 : son poids de 17g ! Son prédécesseur, le Meteor65 pesait 23g, soit un régime de près de 25% pour ce nouveau modèle.
- Il est équipé d’un RX ELRS externe avec une antenne céramique « plate ». Donc pas d’antenne RX qui dépasse. Pour un usage whoop, les performances sont suffisantes. L’idéal aurait été un RX série intégré sur toute les versions et pas seulement sur la « Champion ».
- Les moteurs sont des 0702, avec une entraxe diagonale de 65mm. Ils sont équipé d’hélices de 31mm.
- Il est alimenté par des LiPos 1S avec connecteur BT2.0.
- La FC est au format Whoop (25.5 x 25.5 mm), mais est amputée d’un coin, la rendant encore plus compacte et légère, avec 3 points de fixation.
- Le MCU est un G473, assez similaire au F405 (mais très au-dessus d’un F411), donc pas de souci pour profiter du DShot Bidirectionnel, mais en 4Khz.
- Le gyro est un ICM42688p, on en a déjà parlé, c’est le digne successeur du MPU6000.
- ESCs 8-bits 5A flashés avec le firmware BlueJay qui supportent une PWM Frequency jusqu’à 96Khz.
- Le RX est alimenté quand la FC est branchée en USB.
- Le VTX intégré dispose du Smart Audio et peut monter jusqu’à 400 mW ! Attention, il est également alimenté lorsque la FC est branchée en USB, ça peut chauffer.
- Il dispose d’une Blackbox de 16Mo ! Très pratique et plutôt rare sur une carte de cette taille, elle nous a été très utile !
Logiciels et blackbox avec le AIR65
Voici les logiciels (et versions) que l’on retrouve dans le BetaFPV AIR65 :
- FC – Betaflight 4.5.0, la configuration est assez complète : Smart Audio, vTx Table, DShot Bidirectionnel, PID customs qui sont pas mal, par contre le filtrage est par défaut
- ESCs – Bluejay en version 0.19
- RX – ELRS en version 3.3.0
Dans sa config par défaut, le BetaFPV AIR65 volait déjà très bien.
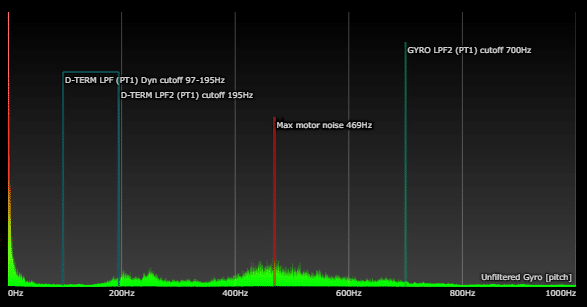
La blackbox est très clean : pas de gros pic de bruit, et surtout, le bruit est assez facile à filtrer, il arrive après les 200Hz. On va donc pouvoir sérieusement optimiser le filtrage et pousser les PID. A noter que la balance P/D est bonne, le drone n’overshoot pas sur les mouvements rapides de roll et de pitch.
Mise en route du AIR65
Avant de pouvoir décoller avec, il y aura un minimum de configuration à faire :
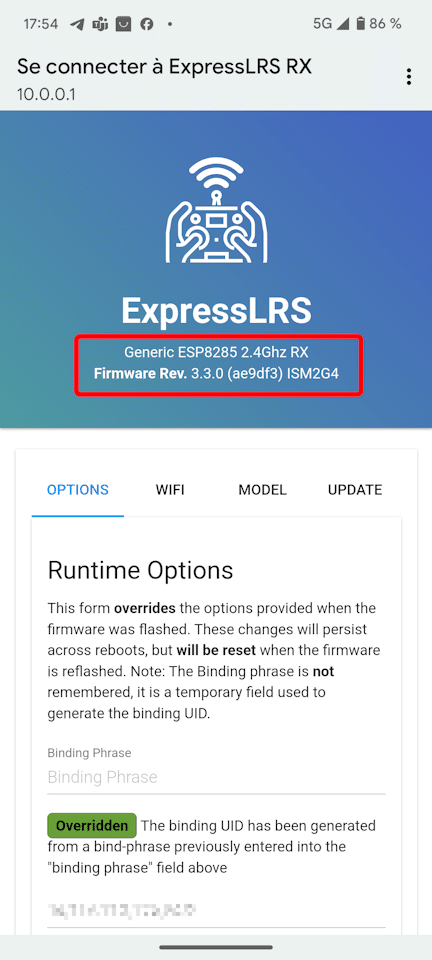
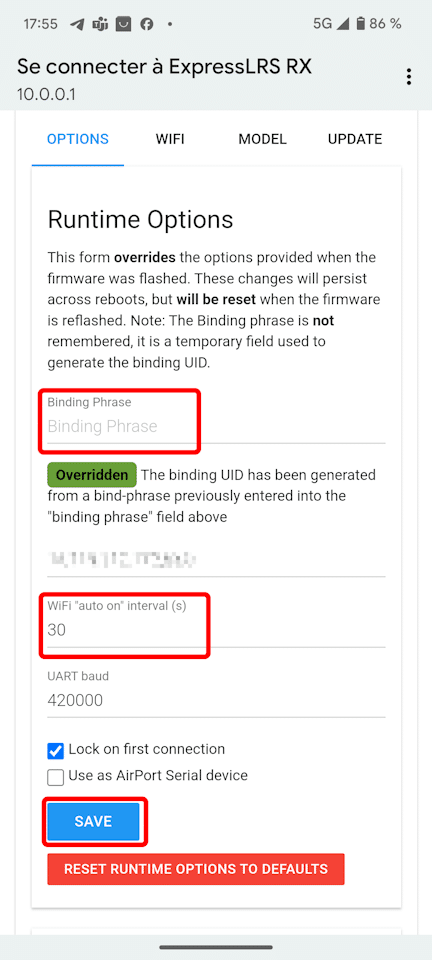
- Bind du Rx : on branche le quad en USB, on attend une minute qu’il passe en Wifi et on s’y connecte avec le téléphone. Mon RX était en version 3.3.0 de ELRS tandis que ma radio en 3.2.0. La version majeure étant identique, je n’ai rien besoin de flasher, c’est compatible. J’ajoute ma binding phrase, je reboote et le Rx est bindé, facile !
- On sauvegarde la config, c’est toujours un bon réflexe avant de toucher à quoique ce soit (diff all ou dump via le CLI, ou via la fonctionnalité de sauvegarde dans Betaflight Configurator)
- On peut maintenant entrer nos réglages personnels, à savoir :
- Modes (AUX)
- Ordre des voies
- Rates
- OSD
- Il faut évidemment des LiPos 1S adaptées. Les LAVA 260 et 300 mAh vont très bien :
- 260 mAh → 2 min de vol indoor assez intense (posé à 3.3V)
- 300 mAh → 2 min 30 de vol indoor assez intense (posé à 3.3V)
- On doit pouvoir les pousser plus loin, car elles remontent autour de 3.7V après quelques minutes, mais j’essaie de les préserver. Et vu le nombre de crash que je me prends en intérieur, ça allonge bien la durée des vols
- Les 300 mAh sont plus longues, elles sont donc plus exposées aux chocs
Optimisations logicielles pour le BetaFPV AIR65
Avant d’aller plus loin dans la review, j’ai fait un certain nombre de d’optimisations au niveau de la configuration logicielle du BetaFPV AIR65 :
- Mise à jour des ESCs pour passer sur la dernière version de BlueJay (0.21) en reprenant les réglages qui avaient été appliqués par BetaFPV sur la 0.19. La mise à jour contient essentiellement des correctifs mineurs, notamment de sécurité.
La mise à jour se fait via le configurateur en ligne.
- Flash de dernière version de Betaflight (4.5.1) avec uniquement les options OSD (SD) et vTx.
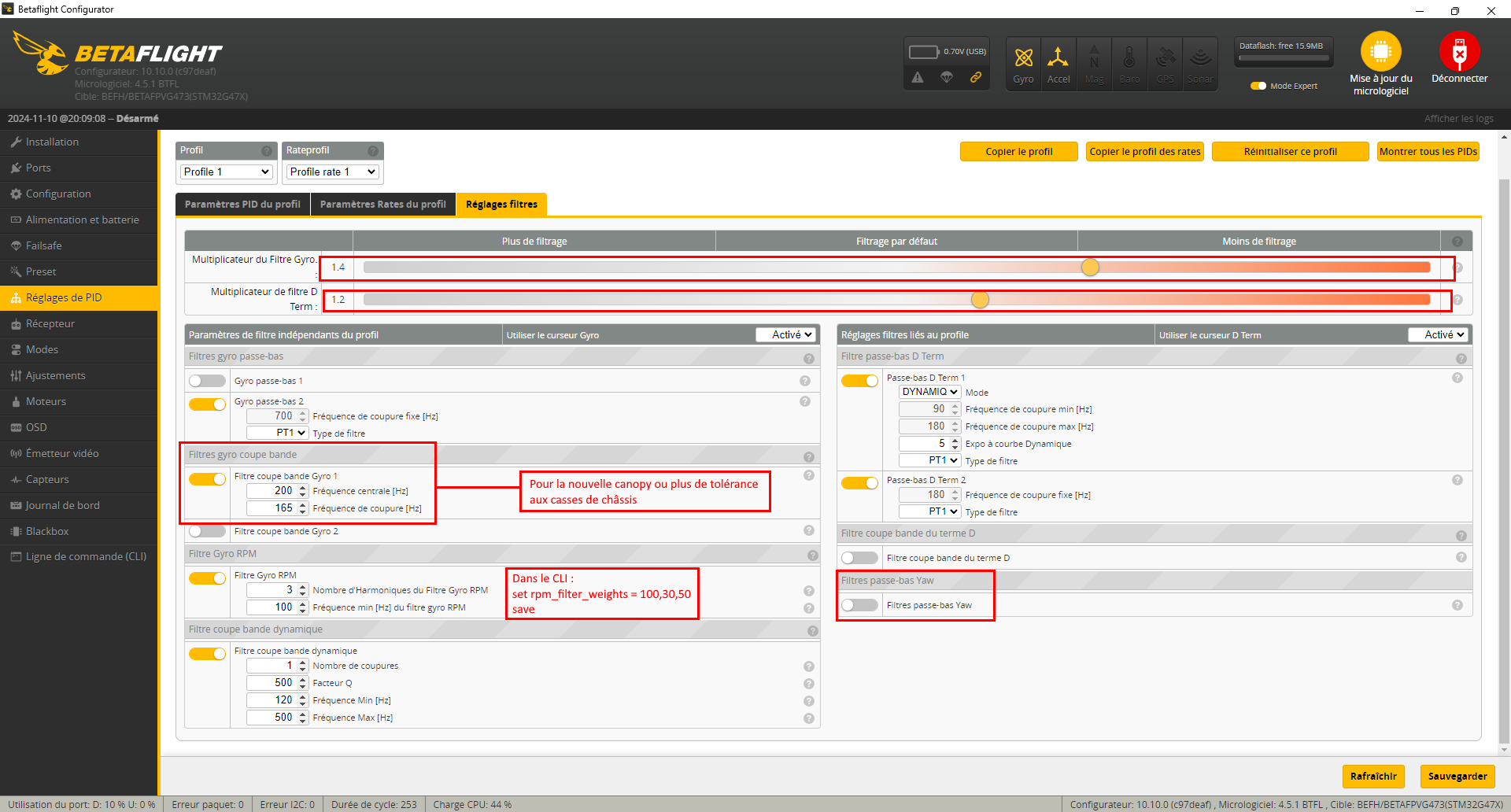
- Filtrage :
- Slider filtres Gyro : 1.0 → 1.4
- Slider filtres DTerm : 1.0 → 1.3
- Yaw filter : off
- Dans le CLI : set rpm_filter_weights = 100,30,50 (save)
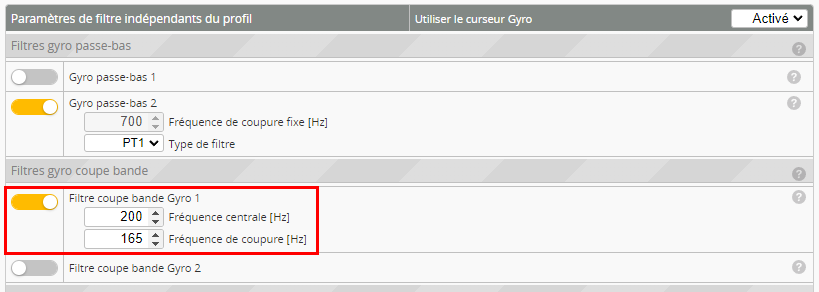
- Filtre coupe bande Gyro 1:
- Fréquence centrale : 200 Hz
- Fréquence de coupure : 165 Hz
- Filtré dédié à la nouvelle canopy ou à plus de tolérance en cas de frame cassée
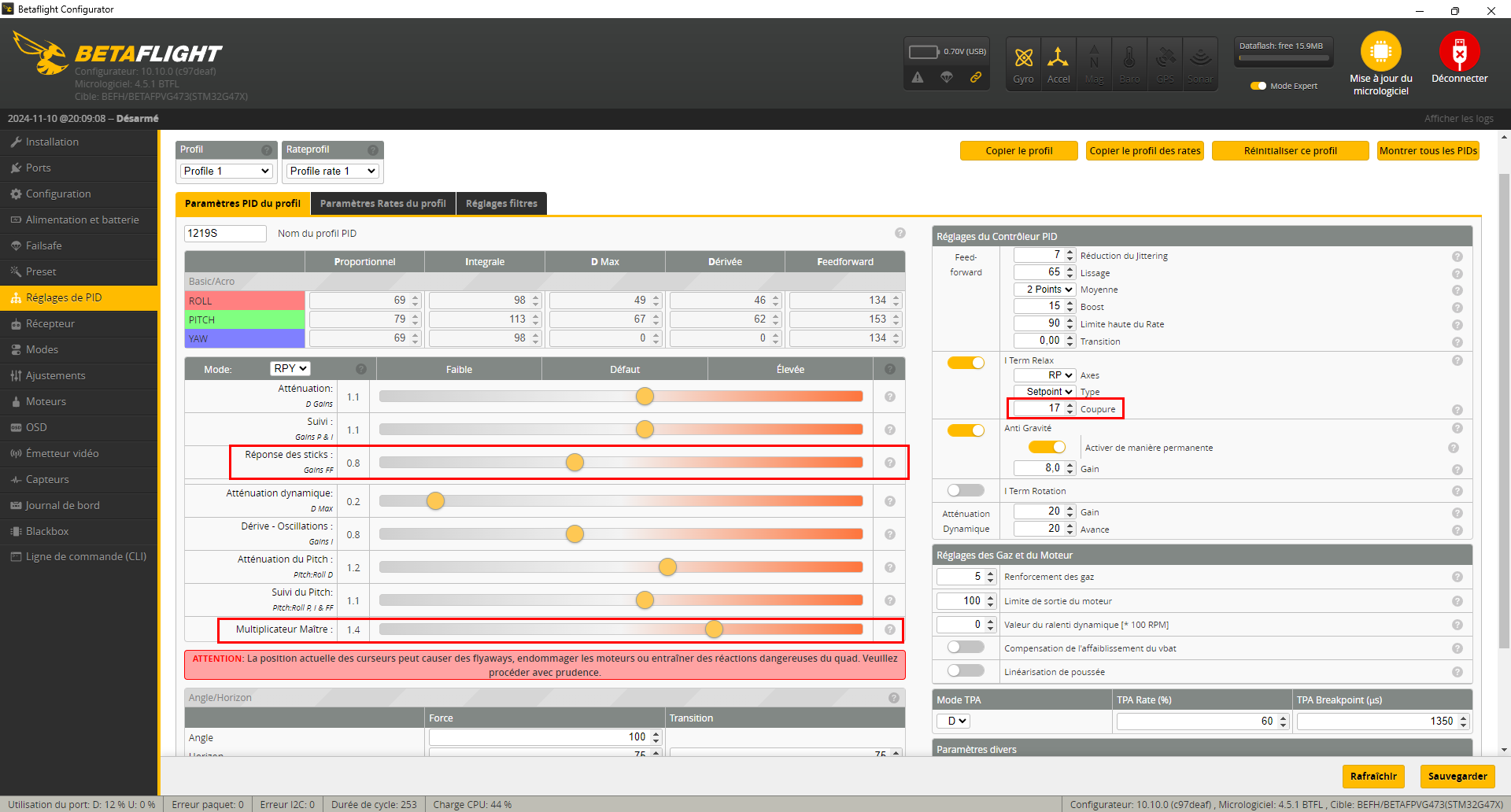
- PID :
- Slider réponse des sticks (Feed Forward) : 0 → 0.8
- Slider Multiplicateur maître : 1.25 → 1.4
- OSD épuré : je n’affiche que la tension et les erreurs
- Preset radio ELRS 500Hz + Smoothing Autofactor à 30
On aurait pu overclocker le MCU pour passer la boucle PID à 8Khz et le protocole ESCs en DShot600. Mais ça vole déjà très bien comme ça avec une charge CPU raisonnable de 60% en vol. Et surtout, l’AiO intégrant un vTx qui chauffe pas mal, il est plus sage de renoncer à cet overclock.
Retour d’expérience sur le BetaFPV Air65
On vous invite à regarder la vidéo pour voir les enregistrements en vol et avoir un aperçu concret de son comportement.
Vidéo
Au niveau de la qualité du retour vidéo, c’est honorable. La caméra n’a pas une super plage dynamique, elle sature vite dans les hautes lumières, mais on voit très bien tout ce qu’on a besoin de voir pour piloter dans de bonnes conditions.
Comportement en vol
Concernant la qualité de vol, c’est un plaisir. Avec la configuration par défaut, c’est déjà vraiment bien, mais une fois la machine optimisée, elle est d’une réactivité folle tout en étant très précise. On arrive même à faire des petits ejects, à se rattraper en sortie de dive, envoyer des powerloop propres… Son poids plume de 17g fait des miracles. Il est super agile, il est très peu sujet au propwash.
Pour quel environnement ?
Je l’ai essentiellement volé en intérieur, et il s’en tire à la perfection. Que ça soit dans un petit appartement, à condition d’utiliser notre canopie pour moins tilter la caméra, ou dans de plus grands espaces. On s’imagine facilement faire des petites courses indoor !

Même en extérieur, il y a de quoi s’amuser. Evidemment, ce n’est pas un toothpick, mais il se débrouillera bien pour tracer au raz du sol, se faufiler entre les obstacles et même passer quelques petits tricks basiques.

Durabilité
Le dernier point : la durabilité. Depuis que je l’ai, je lui ai infligé des centaines de crashs. Les premiers jours, je n’ai fait que voler dans mon appart, donc au pire, c’était des crash depuis l’étage de la mezzanine. Après quelques dizaines de crashes, j’avais l’antenne du vTx qui prenait la mauvaise habitude de se faire la malle. Je n’ai pas réglé le VTX au-delà de 200mW et il a survécu malgré ces courts passages à voler sans antenne.
Le placement de l’antenne serait à revoir, au à minima, il faudrait la sécuriser, on y reviendra.
Ma première casse concerne la canopy. J’ai fini par la casser quand j’ai commencé à faire des dives de 2 étages et à m’écraser au rez-de-chaussée.


A force de crash, j’ai finalement réussi sectionner un coin de la frame et par arracher le fil d’alimentation de la caméra (ressoudé sans problème) !
A aucun moment, malgré ce qu’il a pris, je n’ai eu de problème avec les moteurs, la caméra ou l’électronique. Les principaux points d’attention concernent la canopy et l’antenne vTx, mais on vous explique comment y remédier dans un instant.
La frame est vraiment solide, mais si vous crashez énormément, elle finira certainement par casser, vous pouvez en prévoir au moins une en spare.
Pour qui ?
Le BetaFPV AIR65 s’adresse aussi bien aux pilotes expérimentés qui veulent faire du freestyle ou un peu de race en indoor qu’aux débutants qui cherchent un quad pas cher et solide pour faire leurs premières armes en toute sécurité.
En hiver, comme tous les whoops, il sera votre meilleur ami pour vous permettre de voler au chaud.
La seule condition sera évidemment de disposer d’un équipement analogique !
Les défauts du BetaFPV AIR65
Ce petit quad a énormément de qualités, mais en cherchant, on lui trouve tout de même quelques défauts, pour la plupart assez mineurs. On va maintenant prendre le temps de les passer en revue et surtout d’expliquer comment les corriger quand cela est possible !
L’antenne vTx
Le connecteur µ.FL de l’antenne VTX peut se déclipser lors de gros crash et on perd facilement l’antenne. Un petit point de colle chaude ou équivalent au niveau du connecteur pourrait prévenir cette éjection, même si on rechigne à lui ajouter le moindre gramme.
On peut aussi essayer de la sécuriser avec un petit rislan au niveau de la canopie.
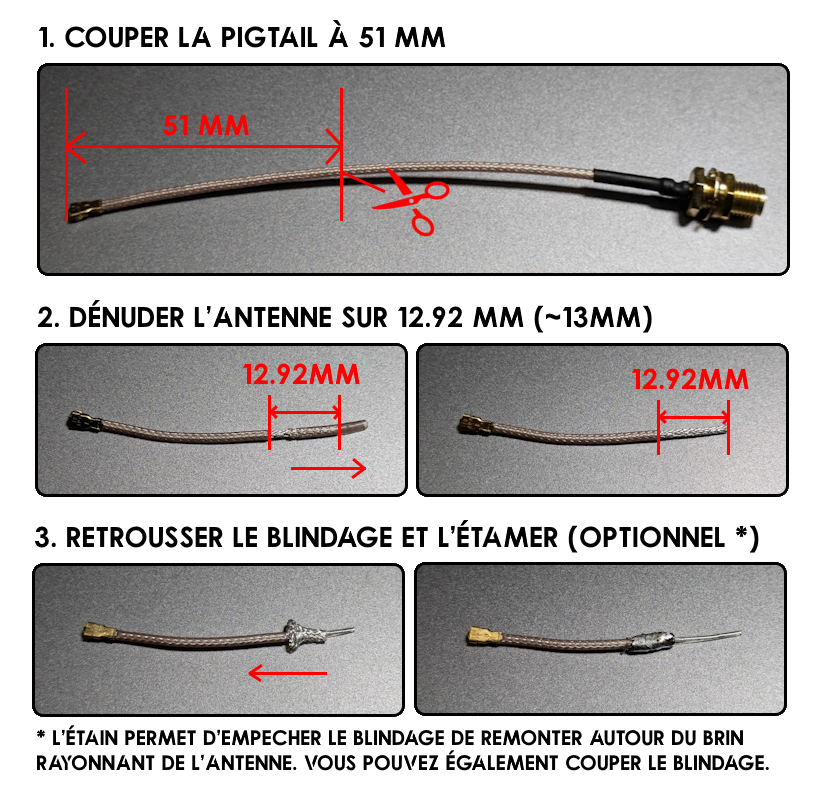
Dans l’absolu, l’antenne est plutôt mal placée. Je m’en suis fait une nouvelle que j’ai fait sortir par l’arrière et ça ne bouge plus, elle est beaucoup moins exposée. J’ai même encore moins de glitches qu’avec l’antenne stock !
Pour confectionner cette antenne, j’ai récupéré une ancienne pigtail qui trainait, je l’ai coupée à la bonne longueur avant de la dénuder en laissant 12.92 mm. J’ai ensuite « retroussé » le blindage que j’ai enduit d’étain. Il faut essayer d’être précis pour que l’antenne soit bien accordée sur la plage autour des 5.8Ghz, entre 12.8 et 13mm ça devrait faire le boulot.
La canopy du AIR65
La “Air Canopy” permet d’ajuster le tilt de la caméra entre 25 et 50°. L’angle le plus faible (par défaut) reste tout de même assez tilté. Les pilotes peu expérimentés auront sans doute un peu de mal en intérieur dans des lieux étriqués.

La solution, c’est d’imprimer une nouvelle canopie. J’en ai trouvé une pas mal en ligne, mais en TPU elle était trop flexible. Je l’ai donc modifiée et le résultat est vraiment super. Ce n’est pas obligatoire, mais pour la rigidifier encore plus, je l’ai chauffée. Attention, il faut être délicat et la laisser refroidir avant de la bouger, sinon elle se déformera.
Au final, comme c’est du TPU elle sera encore plus robuste que la canopy originale et autorisera des tilts beaucoup plus faibles. Ca rajoute 0.25g, on reste donc à 17g.
Le fichier STL est disponible sur la page Printables de de WE are FPV.
Attention : cette version en TPU est un peu plus flexible et parfois elle me générait beaucoup de bruit entre 165 et 235 Hz, en particulier sur le pitch. J’ai donc ajusté le tune avec un notch statique, et c’est enfin parfait !
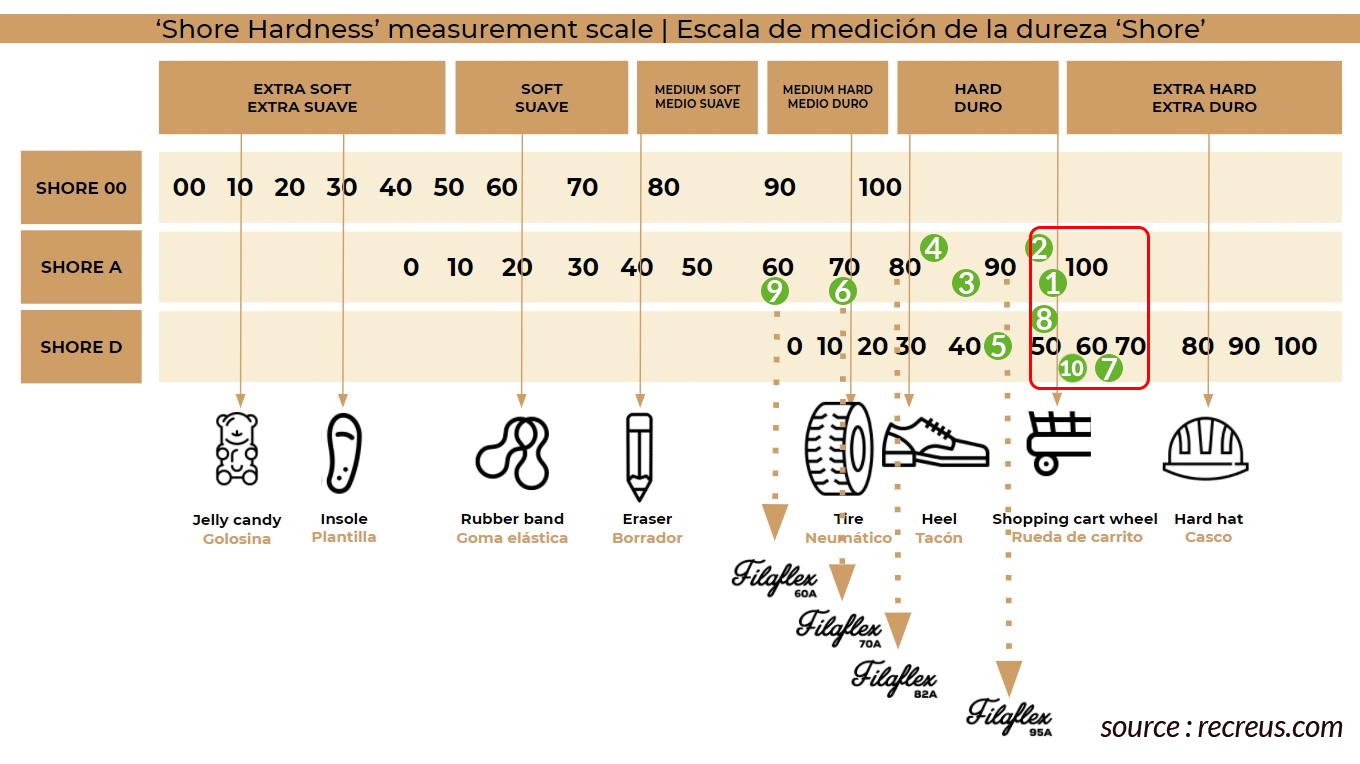
Vous pouvez aussi opter pour un TPU plus dur que ceux qu’on utilise habituellement, avec un indice Shore A supérieur à 95 ou Shore D supérieur à 50.
Le connecteur USB-C
Le connecteur USB-C déporté du BetaFPV AIR65 est légèrement contraignant : ça fait une manip’ supplémentaire et il ne faut pas le perdre. C’est un sacrifice nécessaire pour réduire le poids et une fois le quad réglé, on n’a plus de raison d’y toucher.
Le vTx alimenté en USB
Le VTX est alimenté par la prise USB, il chauffe vite fort sur le bench. Il faudra prévoir un ventilateur, penser à baisser sa puissance à 25mW ou activer le PIT mode.
Pas de Rx intégré à la FC
Il n’y a pas de Rx intégré à la FC sur les versions classiques. Une déclinaison de la FC avec le Rx existe pourtant puisqu’on la retrouve dans la version « Champion ». C’est dommage de ne pas l’avoir généralisée, même si dans la pratique ça n’a aucun impact.
Plus d’optimisations de poids ?
Il aurait peut-être été possible de gratter 1g de plus : fils moteurs, Rx et caméra plus courts, connecteurs BT2.0 moins gros, pas de gaine thermo autour du Rx, mais on pinaille.
Conclusion au sujet du BetaFPV AIR65
C’est une classe de quad sur laquelle je n’étais pas revenu depuis un moment et finalement c’est peut-être là qu’il y a eu le plus d’évolutions dans notre hobby ces derniers temps.
Une machine aussi performante et optimisée clés en main pour une centaine d’euros, ça fait vraiment plaisir à voir. Pour rappel, j’ai testé la version Race. Je n’ai pas testé la version Freestyle, mais je pense que les 4000KV en plus sont les bienvenus.
Bien que je me tienne généralement éloigné de l’analogique, cette petite bestiole m’a vraiment agréablement surpris et elle va m’accompagner pour passer l’hiver.
La plupart de ses défauts sont mineurs, mais s’il y en a un à retenir, c’est la canopy. En particulier pour sa solidité : si vous comptez lui infliger les mêmes sévices que ceux que vous avez pu voir dans la vidéo accompagnant l’article, elle finira par casser.
Et pour les débutants, le tilt de 25° risque d’être vraiment difficile pour de l’indoor. Heureusement, la solution à ces 2 problèmes existent, grâce à la canopy en TPU que l’on vous a partagé. Mais il faudra l’imprimer et également ajuster le tune.
On recommandera de remplacer/modifier l’antenne vTx pour la faire sortir par l’arrière et prévoir une frame de spare à minima. Aussi solide soit-elle, elle n’est pas indestructible.
Le BetaFPV AIR65 est donc bien un excellent TinyWhoop en sortie de boîte : si vous ne volez pas dans des endroits minuscules et que vous ne comptez pas enchaîner les gros dives (et donc les gros crashs), vous n’aurez rien à toucher.
Mais pour en tirer le meilleur, il faudra quand même mettre un petit peu les mains dans le cambouis : canopy en TPU, nouvelle antenne vTx qui sort par l’arrière et ajustement du tune.
Acheter le BetaFPV AIR65
Pour rappel, en suivant ces liens, vous soutenez WE are FPV, même si c’est pour acheter d’autres produits et surtout sans que ça vous coûte plus cher. Si ce geste ne vous dérange pas, n’hésitez pas à cliquer sur ces liens (que vous pouvez également retrouver en barre latérale du blog et du forum) avant vos achats. Merci !