Le drone FPV pour les nuls
Vous êtes nombreux à nous demander très régulièrement quelques pistes pour se lancer dans le drone FPV : par quoi commencer ? quoi acheter ? quel budget ? Si ce guide du débutant et cette première approche de la discipline en couvrent quelques unes, nous avons tout de même décidé d’élaborer cette page. Très inspirée de l’article les premiers pas dans l’univers du vol en immersion (FPV), elle servira d’index et sera mise à jour dans le temps si besoin. Après l’avoir lue, vous aurez toutes les cartes en mains pour voler, rien que ça : voler en immersion (en FPV : First Person View).
Exceptionnellement, cet article sera plus long que d’habitude, l’objectif étant de survoler l’ensemble des aspects de ce hobby pour que vous ayez à votre disposition l’essentiel du vocabulaire et des concepts pour poursuivre l’aventure dans les meilleures conditions possibles.
Le terme « drone » est très générique en français et a souvent une connotation militaire. Même s’il est possible de faire du FPV avec une aile volante par exemple, nous nous concentrerons essentiellement sur les multirotors, et plus précisément sur les quadrirotors (ou quadcopters). Ne soyez donc pas étonnés de souvent entendre parler de « quads » ou de « kwads », ils désignent bien de la même chose : nos drones FPV.
Une table des matières est disponible un peu plus bas pour vous aider à naviguer dans ce guide.
Ce qu’il faut savoir avant de se lancer
Plus le temps passe et plus les composants « bas de gamme » sont performants. Pour quelques dizaines d’euros on peut se fabriquer le « quad du pauvre » qui vole très bien ! Ce racer petit budget est un autre bon exemple et plus récemment ce build milieu de gamme en 6S fait fureur sur le forum.
Cependant, le FPV est un hobby qui nécessite un investissement de base conséquent (lunettes, radiocommande et chargeur). Ensuite, il y a l’investissement régulier qui consiste à réparer et mettre à jour son matériel…
Et qui dit réparer, dit bricoler. On trouve des drones déjà montés et des composants « plug & play » mais si vous persistez dans la discipline, vous devrez mettre les mains dans le cambouis. Vous devrez notamment apprendre les bases de l’électronique et savoir souder. Pour vous aider, on vous a établi une liste des outils indispensables pour commencer le FPV.
C’est donc un loisir très complet et enrichissant qui réunit plein de choses, le modélisme et l’électronique mais pas que, il nécessite aussi d’avoir des réflexes, de la concentration et de la technique. Tout ça mis bout à bout procure beaucoup de sensations, on parle même d’adrénaline quand le moment du décollage est arrivé ! La cerise sur le gâteau : pouvoir réaliser de belles prises de vues ariennes.

La sécurité avant tout
Avant d’aller plus loin, sachez que le drone FPV est un loisir qui peut être dangereux, pour vous et pour les gens à proximité.
Un drone de qui tombe sur quelqu’un (défaillance technique, perte de signal, erreur de pilotage, etc.) peut entraîner de graves conséquences. Heureusement ces accidents sont faciles à éviter avec un peu de bon sens et de prudence. Sans trop entrer dans les détails, la législation impose ces 10 règles concernant l’usage de drones de loisirs :
- Ne pas survoler des personnes
- Respecter les hauteurs maximales de vol (120 mètres de hauteur en général)
- Ne jamais perdre de vue son appareil et ne pas l’utiliser la nuit
- Ne pas faire voler son appareil au-dessus de l’espace public en agglomération
- Ne pas faire voler son appareil à proximité des terrains d’aviation
- Ne pas survoler de sites sensibles ou protégés : centrales nucléaires, terrains militaires, réserves naturelles…
- Respecter la vie privée des autres, en ne diffusant pas les prises de vue sans l’accord des personnes concernées, et en n’en faisant pas une utilisation commerciale
- Vérifier dans quelles conditions on est assuré pour la pratique de cette activité
- En cas de doute, se renseigner auprès de la Direction générale de l’aviation civile (DGAC).
On serait tenté d’ajouter à ces règles, quelques recommandations de « bonne conduite » : nos appareils sont souvent assez bruyants, ils peuvent aussi inspirer crainte et méfiance à certains promeneurs quand ce n’est pas une gêne. Quand on arrive sur un spot ou il y a quelques personnes, ne pas hésiter à aller demander gentiment si ça ne les dérange pas, en général ça se passe bien et les gens sont mêmes souvent très curieux.
En parlant de spot, les sites GeoPortail et DroneSpot peuvent vous aider à vérifier très facilement à quels endroits vous pouvez voler.
Le danger n’existe pas seulement en vol. Chez vous, lorsque vous travaillez sur votre quad, vous n’êtes pas à l’abri d’un accident. Pour limiter les risques, il y a 2 règles d’or :
- Ne jamais travailler sur le quad avec les hélices en place (les hélices peuvent provoquer de graves blessures)
- Ne jamais tester (faire voler) un quad en intérieur
Une précaution supplémentaire consiste à sécuriser l’armement du quad, c’est à dire l’activation des moteurs, en mettant en place le pré-armement (avec un second interrupteur) ou le double armement, afin d’éviter d’armer le quad involontairement.
Pour clôturer ce premier chapitre sur la sécurité, un mot sur les « LiPos ». C’est le type de batteries utilisé sur nos quads (on y reviendra plus tard). Ce qu’il faut retenir pour le moment, c’est qu’elles doivent être utilisées, chargées et stockées prudemment pour éviter une explosion ou un incendie.

Un drone FPV, pour quoi faire ?
Le drone FPV ouvre la porte à plusieurs « spécialités », souvent liées à l’environnement dans lequel on va voler (intérieur, extérieur) et à la finalité visée (loisirs, vidéo, compétition, etc.). En général, on débute avec une approche assez « freeride », le but étant simplement d’apprendre à piloter.
Voici les principaux usages que l’on retrouve pour nos drones, certains pouvant se recouper :
- La cinématique : très à la mode depuis quelques années, les drones FPV permettent de nouveaux types de prise de vues beaucoup plus dynamiques que ce à quoi on était habitué avec les drones de prise de vues classique type DJI Mavic. Il peut s’agir de vidéos en extérieur, mais aussi de vidéo en intérieur, proche de personnes, avec un drone adapté.
- La course (race) : une approche plus compétitive du hobby, qui mettra en avant les réflexes, la précision et l’optimisation de la machine pour en tirer les meilleures performances possibles
- Le freestyle : ici il s’agit de réaliser des enchaînements de figures de manière harmonieuse, en exploitant au mieux l’environnement, chaque pilote développant son propre style.
- Le « long range » : on parle de vol à longue distance (plusieurs kilomètres) permettant d’explorer des endroits difficiles d’accès. Bien que très tentant, ce n’est pas recommandé aux débutants, une bonne maîtrise de sa machine est nécessaire, tant au point de vue du pilotage que du matériel et des technologies mises en œuvre.
- De manière générale, le freeride que l’on pratique finalement tous, c’est du vol libre, sans d’autre objectif que le plaisir de se faire une bonne session, seul ou entre amis.
Chaque quad est à adapter en fonction de l’environnement ciblé et de l’utilisation souhaitée. Mais dans un premier temps, un quad typé freeride pourra être très polyvalent (cinématique, freestyle, mid-range, ec.).

Pour des usages particuliers, il existe aussi différents types de drones comme les CineWhoop, plutôt dédiés à la cinématique en environnement relativement étroit où la sécurité du public doit être prise en compte, les TinyWhoop, de minuscules quads avec des protections d’hélices orientés vers le loisirs en intérieur, les Toothpicks, eux aussi très petits et légers, mais prévus pour une utilisation orientée Freestyle en extérieur. Pour un usage professionnel, les CineLifters, capables de porter de grosses caméras (BlackMagic, Red Komodo…) ouvrent de nouvelles possibilités.
La radiocommande, le premier pas
La première chose à acheter c’est la radiocommande avec laquelle vous allez pouvoir apprendre à piloter sur simulateur. Il existe différentes marques et différents protocoles qui vont souvent de paire.
Les constructeurs
Côté constructeur, le plus répandu est sans conteste FrSky qui fait principalement du milieu de gamme. Avec son look moderne orienté gamer, la X-Lite plaira au plus grand nombre. Les puristes du modélisme préfèrent les Taranis X9D et QX7. FrSky propose aussi une entrée de gamme avec sa X9 Lite.
Un peu plus bas de gamme on a FlySky tandis que Team Black Sheep et Futaba se partagent le marché haut de gamme avec, respectivement la Tango II et la Futaba T18SZ.
D’autres constructeurs comme Jumper ou Radiomaster profitent de l’écosystème des acteurs évoqués plus haut pour proposer leurs radios. La Radiomaster TX16S par exemple, propose une alternative intéressante en milieu de gamme. Elle est même devenue une référence au cours des dernières années.

A l’été 2020, fort de son succès en liaison vidéo, ImmersionRC s’est également lancé dans la liaison radio avec l’ImmersionRC Ghost.
Les protocoles
Tous les constructeurs cités précédemment ont leur propre protocole. Certains de leurs modèles acceptent d’autres protocoles (soit nativement, soit via l’ajout d’un module externe).
En toute logique, c’est le protocole FrSky qui est le plus populaire chez les pilotes de drone. Il est pourtant talonné de prêt par le CrossFire, un protocole plus performant et plus polyvalent développé par TBS (Team Black Sheep). Il existe d’ailleurs de nombreux tutoriaux pour l’installer sur les radios concurrentes comme la QX7. En 2020, on a vu de nouveaux protocoles arriver sur le marché, le Ghost d’ImmersionRC et le TBS Tracer. 2021 fut l’année de l’ExpressLRS (ELRS pour les intimes), un protocole Open Source aussi polyvalent que performant ! Il est même en train de devenir la nouvelle référence, pour un coût inférieur à la concurrence. Et en 2022, les radios intégrant directement un module ELRS se multiplient.
Les axes du drone et les sticks de la radiocommande
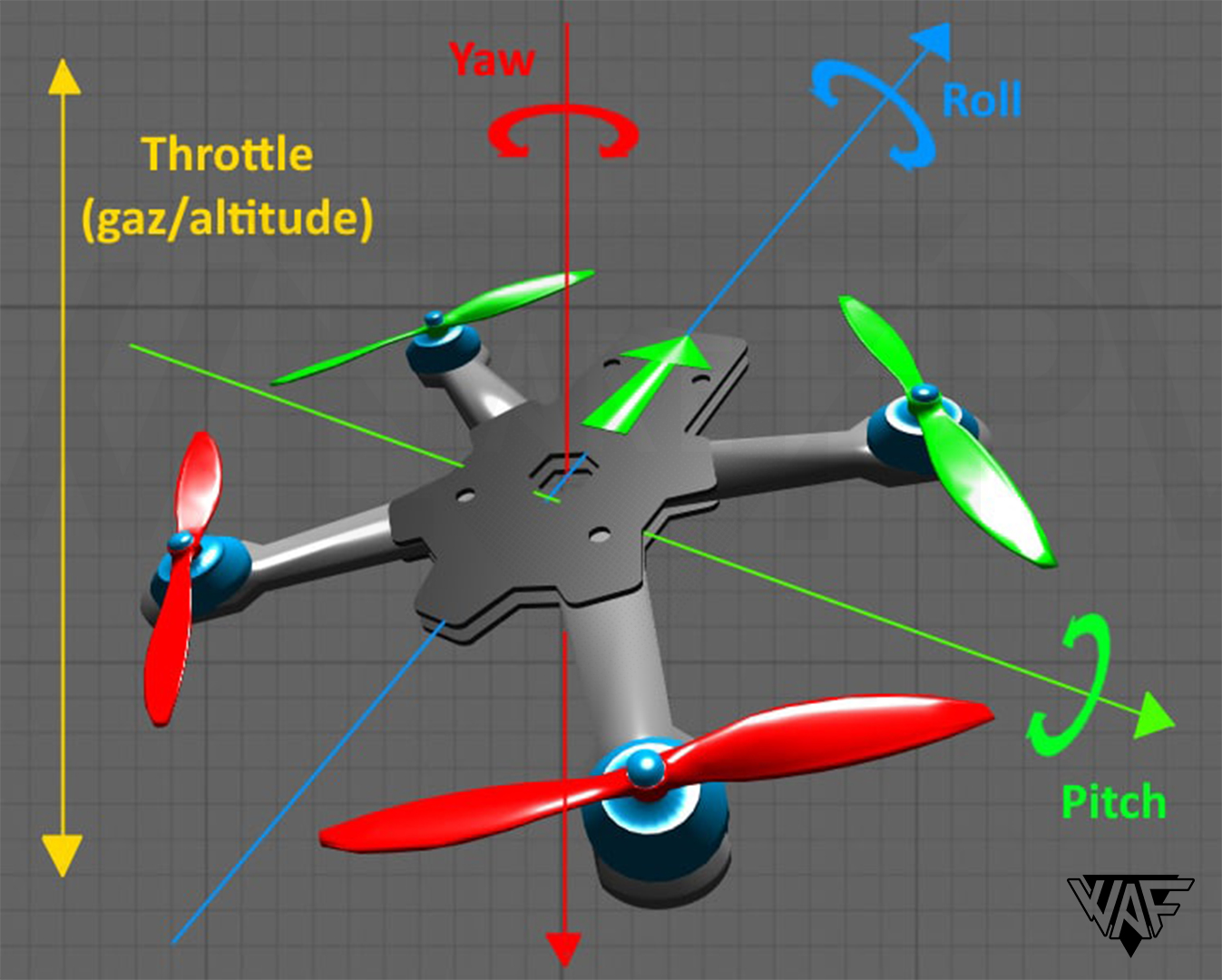
Pour se déplacer, un drone évolue suivant 4 axes, retenez les nom anglais, ils sont les plus utilisés :
- Le Roll (roulis) : qui permet de pencher d’un côté ou de l’autre.
- Le Pitch (tangage) : qui permet de se pencher vers l’avant ou l’arrière.
- Le Yaw (lacet) : permet de tourner au drone de tourner sur lui même tout en restant à plat.
- Le Throttle (les gaz, l’altitude) : qui permet d’appliquer une poussée dans la direction définie par l’ensemble des 3 autres axes.
Sans surprise, notre radiocommande dispose de 2 sticks et donc 4 axes pour agir sur le drone via les gaz, le Roll, le Pitch et le Yaw. Il existe 4 modes de vols définissant chacun une répartition de ces axes sur nos 2 sticks. On ne rentrera pas dans le détails ou les raisons historiques expliquant l’existence de plusieurs modes. Ce qu’il faut retenir, c’est qu’aujourd’hui, le Mode 2 est de très loin le plus répandu.

Un dernier mot concernant les sticks. Ils permettent de déplacer les « gimbals » sur 2 axes. Ces mouvements sont enregistrés par des capteurs afin d’être transmis au drone.
Les radiocommandes d’entrée de gamme sont équipées de gimbals « classiques », basées sur des potentiomètres. C’est largement suffisant pour commencer, mais les frottements finiront pas user les potentiomètres qui perdront en précision.
Les modèles milieu de gamme et haut de gamme intègrent des gimbals avec capteurs à effet hall. Ces capteurs s’appuient sur des phénomènes magnétiques, il n’y a pas de frottement, ils sont donc plus précis et plus durables.
Et dans le très haut de gamme, on trouve des gimbals « Full CNC », complètement en métal, offrant une durabilité, une précision et un feeling inégalés.
Le simulateur
Une fois que vous avez choisi une radiocommande, il va falloir choisir un simulateur. Dans la vidéo ci-dessous, Qnnk vous donne quelques conseils pour progresser plus rapidement sur son simulateur préféré : GTA V.
Il en existe d’autres comme Ereadrone, Velocidrone et DCL qui sont plutôt orientés race (course de drone). Liftoff quant à lui saura contenter les amateurs de freestyle avec des maps (cartes) plus contenues que GTA.
On ne manquera pas non plus de mentionner, les 3 derniers simulateurs made in France : Uncrashed, AI Drone Sim et Tryp FPV.
Ces simulateurs sont payants, les prix ne dépassant pas la vingtaine d’euros. Cette somme est très raisonnable, rapportée à leurs avantages :
- Voler longtemps (pas de contraintes LiPos)
- Voler quand on veut, même si la météo est mauvaise ou qu’il fait nuit
- Pas de casse coûteuse
- Pas besoin de trouver un spot et préparer tout son matériel
Bref, c’est un excellent outil de progression. Néanmoins, il en existe des gratuits, dont le très récent Orqa FPV.Skydrive ou encore Worlds Adrift pour se faire la main sans dépenser un sous.
Vous pouvez aussi appréhender le pilotage du drone sur smartphone avec FPV Freerider mais ce n’est pas la méthode la plus efficace.
Il est même possible de voler en « vraie » FPV pour appréhender le port du masque ou des lunettes grâce aux modèles disposant d’une entrée HDMI.
N’hésitez pas à passer sur le forum dans la rubrique dédiée aux simulateurs ou sur le Discord pour jouer en ligne avec la communauté.
Anatomie d’un drone FPV
Cette partie sera un peu plus technique, mais nécessaire si vous souhaitez poursuivre sereinement dans le hobby. Il y a tout un vocabulaire qui peut faire peur de prime abord. Pour démystifier cet univers, on va rapidement passer en revue les différents éléments qui composent un drone FPV, en y ajoutant quelques informations pratiques.
Il n’est pas indispensable de tout retenir, mais se souvenir du rôle de chaque composant sera utile. Vous pourrez aussi y revenir plus tard, cette partie n’est pas un pré-requis pour la suite de cet article, ni même pour faire ses premiers vols avec des modèles « Plug&Play » (PNP/BNF/RTF).
Vue d’ensemble
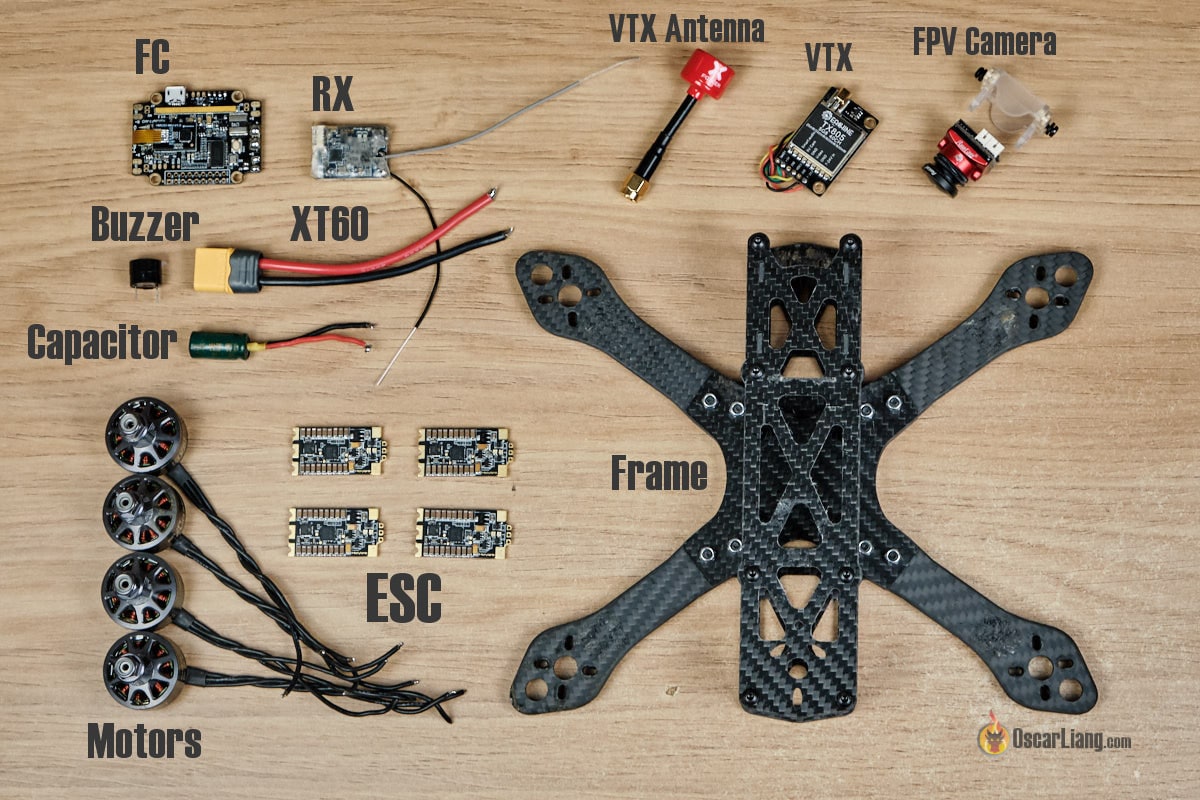
La batterie
Nos quads sont très énergivores, ils ont besoin de batteries capables de délivrer d’importantes puissances en très peu de temps. C’est pourquoi on utilise essentiellement des batteries à base de Lithium Polymère, que l’on nomme communément « LiPos« . Quelques caractéristiques importantes d’une LiPo :
- Le nombre de cellules (souvent de 1 à 6), qui définit la tension de la LiPo. La tension nominale d’une cellule est de 3,7V. Une LiPo 4S, contiendra 4 cellules en série et aura donc une tension nominale de 14,8V (3,7×4).
- Une capacité, indiquant la quantité de courant qu’elle peut délivrer pendant une heure, exemple : 1500 mAh.
- Un taux de décharge, permettant de calculer la quantité maximale de courant qu’une LiPo peut délivrer à un instant T. Une LiPo de 1500 mAh avec un taux de décharge de 100C, pourra délivrer en continu 1,5 x 100 = 150A. En général, elles sont en mesure de délivrer le double pendant quelques secondes. Cette caractéristique reste à prendre avec des pincettes, les fabricants prenant pas mal de libertés.
- Un connecteur, pour la brancher au quad ou au chargeur, le plus répandu étant le XT60, ou le XT30 pour les plus petites LiPos. Les plus petits engins volants comme les TinyWhoop ont des connecteurs encore plus petits, de type JST, JST-PH et plus récemment BT2.0.
Les LiPos peuvent être dangereuses et doivent être utilisées et stockées de manière sécurisée. Voici quelques règles à suivre pour éviter les mauvaises surprises :
- Privilégier un chargeur de qualité (SkyRC, ISDT, etc.) supportant jusqu’à 6S et offrant quelques options utiles comme la décharge, le stockage, la mesure de la résistance interne, la gestion des LiPos HV (High Voltage, pouvant être chargées jusqu’à 4,35V par cellule au lieu de 4,2V pour une LiPo classique).
- Ne pas charger trop fort ni trop lentement, idéalement à 1 ou 2C (par exemple à 2A pour une lipo de 1500mAh).
- Ne jamais complètement décharger une LiPo (s’arrêter à 20% ou 3,5V par cellule), pour lui garantir une bonne durée de vie. Si une cellule descend sous les 3V, elle sera certainement irrécupérable.
- Toujours rester à côté de ses LiPos pendant qu’elles chargent.
- Toujours charger les LiPos en mode « balance » pour s’assurer que chaque cellule est également chargée.
- Quand une LiPo n’est pas utilisée pendant une longue période, la passer en mode stockage (~3,85V par cellule), toujours pour préserver sa durée de vie.
- Conserver ses LiPos dans un conteneur adapté. Les boites de munitions (en métal) sont bien adaptées, à condition de retirer une partie de l’étanchéité (pour éviter l’effet cocotte minute en cas de fuite ou de feu). On peut même ajouter un morceau de placoplatre au fond.
Les hélices
En anglais « propellers » ou simplement « props« . Elles se caractérisent par :
- Une taille : le diamètre, exprimé en pouces (inches).
- Un pas (pitch) : il se mesure aussi en pouces et sans entrer dans le détail, c’est comparable au « pas » d’une vis (l’air jouant le rôle de l’écrou). Plus le pas est élevé, plus les pales seront inclinées.
- Le nombre de pales.

Ainsi, une hélice « 50383 » ou 5×3.8×3 correspondra à une hélice de 5″ de diamètre avec un pas de 3.8″ et 3 pales. Souvent vendues par 4, elles se répartissent en 2 paires (l’une pour tourner dans le sens des aiguilles d’une montre (CW pour Clock Wise), l’autre dans le sens anti-horaire (CCW pour Counter Clock Wise)).
Le châssis
« Frame » en anglais, le châssis est le squelette de nos quads, c’est sur lui que l’on va fixer tous les composants du drone. Dans 99% des cas, ils sont essentiellement composés de carbone, matériau à la fois solide, rigide et léger.
Le châssis est avant tout caractérisé par la taille des hélices qu’il va pouvoir accueillir, on parle donc fréquemment de châssis 5″ par exemple. Une autre façon de décrire sa taille est d’utiliser la distance qui sépare les axes de 2 moteurs (mesurée sur une diagonale).
Autre caractéristique importante : sa géométrie. Le choix est vaste, mais pour se limiter aux principales géométries, on listera :
- Le « True-X » : les 4 bras se croisant en format des angles droit.
- Le « Wide-X » ou « Squished » : les moteurs sont plus proches les uns des autres sur chaque côté. Les hélices sont moins visibles au niveau de la caméra. C’est une configuration plus répandue pour le Fresstyle/Freeride/Cinématique.
- Le « Stretched » : à l’inverse d’une configuration squished, ce sont les moteurs avant et arrière qui sont rapprochés. C’est une géométrie qui favorise la vitesse et que l’on retrouve davantage sur les quads de course.
La géométrie du corps du châssis peut aussi varier. On parlera de châssis en « bus » quand le corps du quad est en longueur, c’est plus spacieux pour l’électronique et ça permet de positionner une caméra HD à l’avant ainsi qu’une LiPo à l’arrière sans difficulté. Ce type de châssis est en général plus lourd et donc peu compatible avec la course. Pour cette discipline on privilégie des châssis minimalistes.
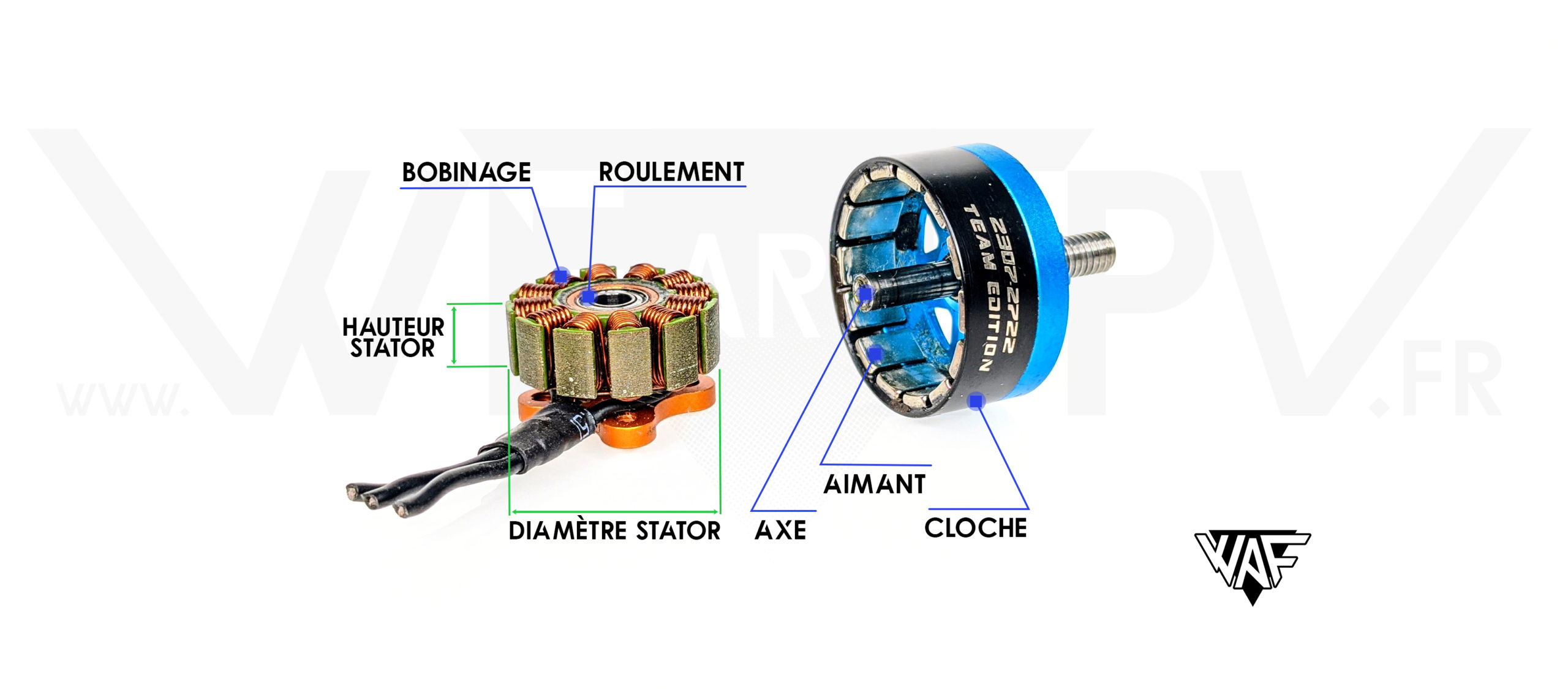
Les moteurs
Ce sont eux qui font tourner les hélices et permettent à nos quads de voler. Sur un quadrirotor, il faut savoir que 2 moteurs tournent dans le sens des aiguilles d’une montre et les 2 autres, dans le sens inverse, sinon il ne pourrait pas maintenir une position stable à cause de la force centrifuge. Un moteur est caractérisé par :
- Sa taille : un moteur de type 2207 aura un stator de 22 mm de diamètre et une hauteur de 7 mm.
- Sa vitesse de rotation pour 1V : elle est indiquée en KV, ainsi un moteur donné à 2500 KV, tournera à 2500 tr/min par Volt. S’il est alimenté en 4S (14,8V), il tournera au maximum à 37 000 tr/min (2500×14,8).
- Une plage de tension d’utilisation recommandée : par exemple, 3-4S.
Les contrôleurs des moteurs
On les nomme ESCs pour Electronic Speed Controller. Ce sont eux qui récupèrent l’énergie de la LiPo et la transforme à un format permettant de faire tourner les moteurs à la vitesse voulue. Ils utilisent une électronique assez avancée et intègrent un logiciel (firmware) pour assurer leur fonctionnement. Ce logiciel peut être mis à jour. Aujourd’hui, on retrouve essentiellement les firmwares BLHeli_S et BLHeli_32 (le plus avancé). Les ESCs sont BLHeli_S peuvent souvent être flashés avec un firmware plus récent, Bluejay, leur permettant de bénéficier de nouvelles fonctionnalités.
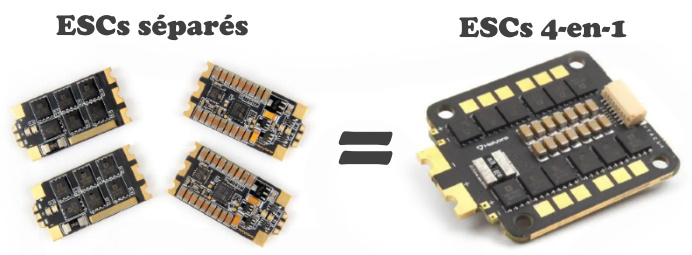
Il y en un pour chaque moteur, parfois, ils sont « séparés » et trouvent leur place sur les bras du quad, mais de plus en plus, on les trouve au format « 4-en-1« . Dans ce cas, ils sont réunis sur une même carte électronique au format 20×20 ou 30x30mm (espacement des trous pour la fixation).
Dans le cas de 4-en-1, c’est généralement sur la carte des ESCs que l’on connecte la LiPo. Pour des ESCs séparés, il faudra les alimenter autrement, par exemple en utilisant une PDB (Power Distribution Board) comme la Airbot Matrix qui se chargera de fournir l’énergie aux différents composants du quad.
Les ESCs reçoivent les directives concernant concernant la vitesse que doit avoir chaque moteur grâce à un protocole leur permettant de communiquer avec le « cerveau » du quad. Au fil du temps, de nombreux protocoles se sont succédé. On retiendra qu’un protocole numérique s’est imposé, le DShot. Il est disponible sous plusieurs déclinaisons (DShot300, 600, 1200, etc.) dont la vitesse de communication est plus ou moins rapide.
La caméra FPV
A ne pas confondre avec la caméra HD (facultative) dédiée à l’enregistrement en bonne qualité des vols. La caméra FPV filme le retour que l’on aura dans nos masques ou lunettes. Plusieurs formats sont disponibles, à choisir en fonction du châssis qui les accueillera : nano (14x14mm), micro (19×19), mini (21.8×21.8), full size (26×26).
Deux types de capteurs sont les plus répandus : le CCD et le CMOS, ce dernier étant aujourd’hui le plus courant.
Les caméras sont équipées d’une lentille dont la taille définit leur champ de vision (FOV pour Field Of View). Certaines sont optimisées pour un usage 4/3 ou 16/9 alors que d’autres sont paramétrables.
Il existe également des caméra « hybrides« , permettant à la fois de renvoyer un flux FPV et d’enregistrer de la vidéo HD. Elles sont néanmoins plus encombrantes et souvent moins efficaces que des solutions dédiées, tant pour le retour vidéo que l’enregistrement HD.
Toutes les caméras FPV que nous avons testées
Le transmetteur vidéo
Communément appelé vTx (pour Video Transmitter), il récupère le flux vidéo filmé par la caméra FPV pour le transmettre à un récepteur (masque, lunettes, écran,etc.) via un signal radio, le plus souvent en 5.8 Ghz. La fréquence sur laquelle émet un VTX est déterminée par une bande et un canal.
En général, on se positionne sur la « Raceband » qui a le mérite de répartir au mieux les canaux sur des fréquences suffisamment espacées pour pouvoir voler à plusieurs sans se gêner. La puissance du vTx est également réglable, même si la législation française impose de ne pas dépasser les 25mW.

La plupart des émetteurs récents proposent une fonctionnalité « Smart Audio » ou « IRC Tramp » permettant de régler son vTx à distance.
Un vTx nécessite une antenne pour émettre. D’ailleurs prudence : ne jamais mettre un vTx sous tension sans antenne connectée sous peine de le griller. On retrouve 2 types de connecteurs au niveau du vTx : le µ.Fl et le MMCX.
Historiquement, les vTX analogiques étaient la norme, car nous n’avions pas d’autres options. Mais ces dernières années, le numérique a enfin fait son apparition dans le le FPV et s’est très vite démocratisé.
Les antennes vTx
Il existe de nombreux types d’antennes, certaines étant omnidirectionnelles d’autres directionnelles. Sur nos quads, on met des omnidirectionnelles, le quad étant en mouvement permanent, il doit émettre dans toutes les directions.
Les antennes sont polarisées, soit en RHCP (Right-Hand Circularly Polarized) soit en LHCP (Left-Hand Circularly Polarized). Sans entrer dans les détails, il est préférable d’harmoniser le type de polarisation entre l’émetteur et le récepteur (tout en RHCP par exemple). Il existe aussi des antennes à polarisation linéaire, que l’on retrouve surtout sur des quads de petite taille.
Enfin, un mot sur les connecteurs : certaines antennes embarquent directement un connecteur adapté au vTx (µ.FL ou MMCX), mais souvent on passe par un connecteur intermédiaire au format SMA ou RP-SMA. Quand vous choisissez vos antennes, assurez vous toujours du type du connecteur qui sera utilisé, vous ne pourrez pas visser une antenne SMA sur une prise RP-SMA.
Le récepteur radio
En général abrégé en « Rx » (pour Receiver), c’est lui qui reçoit les commandes envoyées par la radio et les transfère au quad (une fois la procédure de « binding » effectuée comme dans cet exemple). Certains modèles prennent également en charge la télémétrie, qui permet au drone et à la radio d’échanger d’autres informations, dans les 2 sens (par exemple pour faire remonter à la radio l’état de la LiPo ou la position GPS).
Le Rx utilise un protocole pour échanger avec le quad. Les plus répandus sont le SBUS, l’IBUS, le F.Port ou le Crossfire (CRSF), en fonction des solutions choisies.
Le logiciel embarqué (firmware) du Rx peut être mise à jour, souvent grâce à la radiocommande, avec ou sans fil, pour supporter de nouvelles fonctionnalités.

Le contrôleur de vol
Enfin, nous pouvons parler du contrôleur de vol, ou « FC » pour Flight Controller. Nous l’avons gardé pour la fin, car il se trouve au cœur de tous les composants vus précédemment, c’est le chef d’orchestre de tout ce petit monde, un vrai petit ordinateur.
Il embarque d’ailleurs un microprocesseur ou MPU (de génération F4, F7 ou encore G4, H7 pour les plus récents), des capteurs (gyroscope, accéléromètre, capteur de tension, etc.) et propose des entrées/sorties (UARTs), accessibles grâce à des pads à souder pour y connecter le reste des périphériques du quads (ESCs, Rx, vTx, etc.).
Bien souvent, c’est la FC qui ajoute l’OSD au-dessus du flux vidéo de la caméra. L’OSD permet de visualiser dans le retour vidéo plein d’informations utiles (comme l’état des lipos, la durée du vol, la qualité du signal radio etc.).
Il se présente sous la forme d’une carte électronique, au format 20×20 ou 30×30 (et même 16×16 ou 26×26 pour les nano quads). Quand la FC est vendue avec des ESCs 4-en-1, on parle de « stack » (pile de cartes électroniques).
On notera l’existence de FC « AiO » (All-In-One), qui intègrent plusieurs fonctionnalités :
- PDB, pour l’usage d’ESCs séparés.
- ESCs, de plus en plus fréquent pour les TinyWhoop ou Toothpicks.
- Le vTx et le Rx sont parfois aussi de la partie.
Pour fonctionner, une FC s’appuie sur un logiciel embarqué. Comme pour les ESCs, on parle de firmware. Les plus répandus étant Betaflight, KISS, Emuflight et FlightOne/FalcoX. D’autres sont plus orientés « vol autonome », comme c’est le cas pour iNav.
Ce firmware a la lourde tâche d’analyser en temps réel tout ce qui se passe pour adapter le comportement du quad aux ordres reçus via le Rx. C’est lui qui indique aux ESCs à quelle vitesse faire tourner chaque moteur.
Chaque quad étant différent, on peut aider le firmware à ajuster son comportement pour qu’il corresponde le mieux possible au quad, et ainsi procurer de meilleures sensations de vol. Ces ajustements se font via des paramètres : les PIDs (Proportionnelle, Intégrale, Dérivée) et les filtres (qui visent à supprimer les parasites des différents signaux). Ce sujet dépasse largement le cadre de cet article, mais sachez que ça existe, et un jour ou l’autre, vous vous y intéresserez de plus près.
Le condensateur

Petit composant souvent sous-estimé, son rôle est d’absorber les pics de tension pour protéger l’électronique et filtrer le bruit généré par les ESCs.
On l’utilise avant tout pour limiter les perturbations qui peuvent apparaître dans le retour vidéo en analogique, mais il ne faut pas oublier ses effets « invisibles » de protection et de filtrage, par exemple : le gyroscope est très sensible, et plus le signal en entrée est propre, mieux le contrôleur de vol saura faire son travail (moins de filtrage logiciel à appliquer).
Le placement idéal d’un condensateur est au plus près de la source du bruit, et donc des ESCs. Pour des ESCs 4-en-1, on le soudera au niveau des pads de la pigtail permettant de connecter la LiPo. Pour des ESCs séparés, l’idéal est de mettre un petit condensateur sur chaque ESC. Un condensateur se soude en parallèle de l’alimentation, sur le « + » et le « -« , en prenant soin de respecter la polarité.
Un condensateur est définit par sa capacité (en µF) et sa tension de service limite, à dimensionner en fonction de la configuration du quad. Dernier point, il faut impérativement utiliser un condensateur « LOW ESR » (faible résistance série).
En complément, l’ajout d’un Spike Absorber permettra une meilleure protection de l’électronique face au pics de tension.
Autres périphériques
On a vu l’essentiel. Il reste possible d’ajouter d’autres périphériques au quad, par exemple : un buzzer (pour le retrouver plus facilement), un GPS, des LEDs etc.
Le premier drone
Une fois que vous avez acquis le minimum connaissance et que vous avez de bonnes bases sur simulateur, vous pouvez passer à la pratique en limitant les risques de casse.

En fonction de votre niveau en bricolage, du temps libre que vous avez mais aussi et surtout de votre motivation, vous pouvez partir sur un drone prêt à voler (dit RTF, pour Ready To Fly) ou fabriquer le votre. C’est bien évidemment cette dernière méthode plus formatrice que nous vous conseillons. Si vous cherchez des exemples de configurations et de montage, n’hésitez pas à consulter la rubrique DroneBuilds du forum.
Tinywhoop ou Toothpick

Pour commencer, il est préférable de partir sur un petit drone pour plusieurs raisons. Tout d’abord, ça coûte moins cher à l’achat mais aussi à l’entretien. Ensuite, c’est moins dangereux et on peut voler plus facilement presque partout. Avec un TinyWhoop on peut même voler chez soi sans risque de casse ou de blessure grâce aux carénages qui protègent les hélices de petite taille.

Pour l’extérieur, les Toothpick sont à la fois plus performants et plus agréables en vol tout en restant abordables d’un point de vu budget. Ils procurent des sensations s’approchant des quads 5″, l’inertie en moins.
5 pouces et plus
Il est tout à fait possible de débuter avec un gros drone racer 5″ puissant et bruyant si vous en acceptez les contraintes.

Si vous optez pour la première solution (achat d’un drone RTF), on vous conseille l’Emax Buzz ou le Nazgul5 V2.
Dans l’optique de construire vous-même votre drone FPV, ce sujet du forum vous donnera quelques pistes sûres et des conseils utiles pour mettre toutes les chances de votre côté. Le DroneBuilds sera également une très bonne source d’inspiration.
Enfin, n’hésitez pas à consulter ce guide très complet : Concevoir son drone : du choix des composants au premier vol.
Les lunettes FPV, le masque FPV ou encore l’écran FPV
La particularité de notre loisir, par rapport à l’aéromodélisme en général, c’est le point de vue. En FPV, comme le nom l’indique, on voit comme si on était à bord du quad ! Quand on dit qu’on « va voler », on n’est pas loin de la vérité. Plusieurs solutions s’offrent à nous : le masque, les lunettes ou l’écran, chacun ayant ses avantages et inconvénients. Le monde des lunettes bouge beaucoup en ce moment, avec notamment l’arrivée de la HD.
Analogique ou numérique HD ?
Pendant des années, la question ne se posait pas, nous n’avions que l’analogique à notre disposition (du moins pour le grand public car il existait déjà des approches HD mais peu démocratisées). Durant l’été 2019, tout a été bouleversé avec l’arrivée surprise du DJI FPV System. La concurrence a encore du mal à se mettre en place, même si FatShark a récemment teasé son Byte Shark. Plus récemment, en 2022, Walksnail (une filiale de Caddx) a enfin sorti un système à la hauteur de DJI baptisé Avatar.
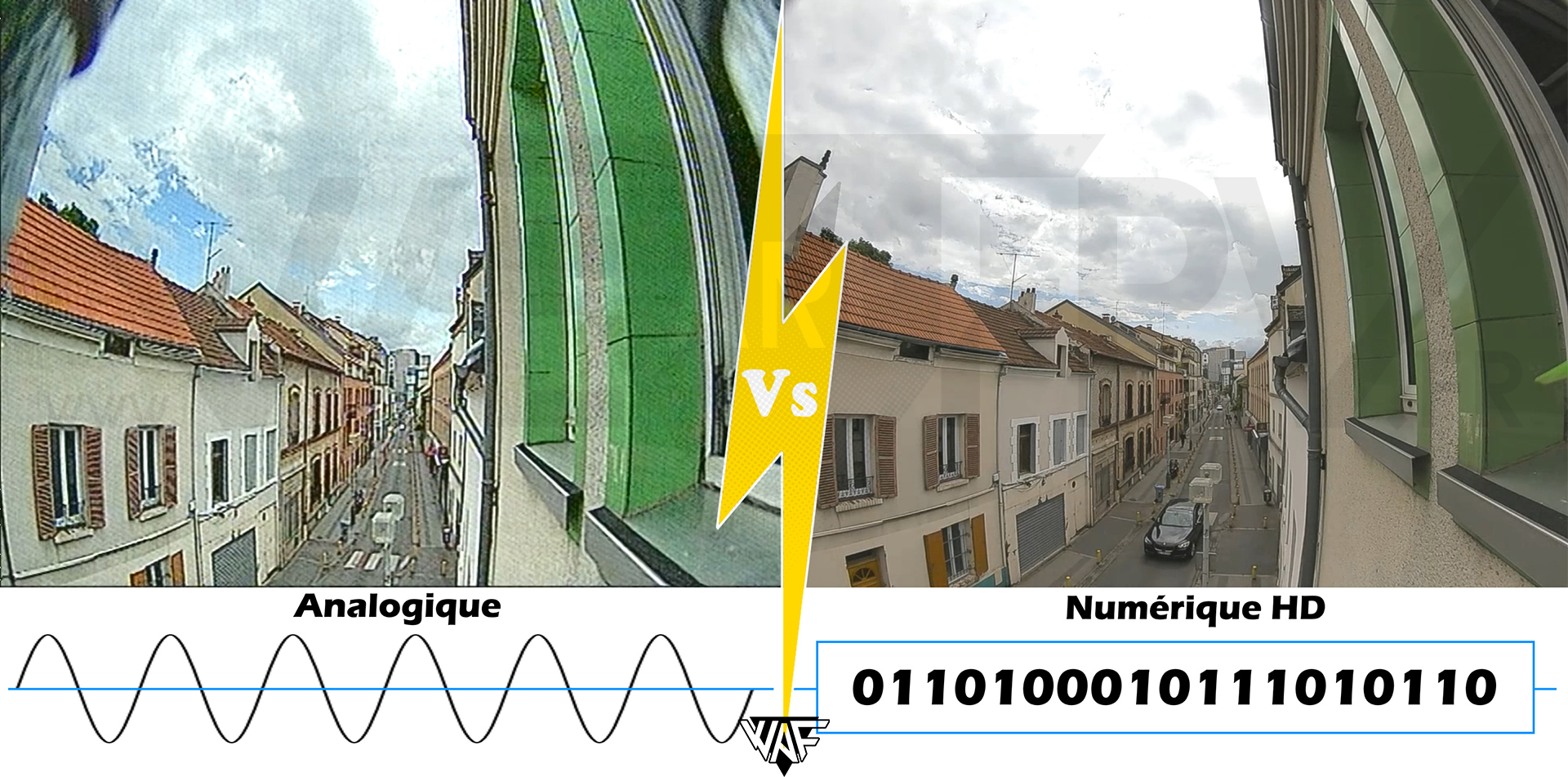
La solution proposée par DJI est une petite révolution, la plupart des pilotes ayant déjà sauté le pas n’imaginent pas revenir en arrière. Pour une personne déjà équipée en analogique, le prix du ticket d’entrée peut décourager, surtout s’il faut mettre à jour un parc important de machines. Mais pour un nouvel arrivant dans le hobby, cette solution ne coûte pas plus cher que de l’équipement analogique haut de gamme.
Prenez bien le temps de vous renseigner, de nouvelles choses devraient arriver dans les prochains mois, surtout si votre budget est assez large, on y reviendra en fin d’article.
En 2022, la poussée de la HD se poursuit. Si DJI est bien installé, FatShark a abandonné son Shark Byte pour nouer un partenariat avec Walksnail, dont la solution ressemble fortement à celle de DJI mais reste encore assez mystérieuse. Et HDZero reprend le lead sur une solution HD vouée à devenir Open Source (sur laquelle se basait le Shark Byte).
Les masques FPV
Pour schématiser, il s’agit d’une « boite » avec un grand écran.

C’est la solution la plus abordable, et de très loin. En général, les masques offrent un champ de vision important (FOV, Field Of View) grâce à des écrans intégrés d’une taille assez importante. Certains masques permettent aux pilotes ayant une correction visuelle de continuer à porter leurs lunettes de vue.
Du côté des inconvénients, les principaux sont l’encombrement et le poids.
Les lunettes FPV
Contrairement aux masques, les lunettes disposent de 2 écrans, un pour chaque œil.

Les lunettes sont en général bien plus confortables et légères. Elles prennent peu de place et sont faciles à loger dans un sac. Les porteurs de lunettes de vue pourront se faire découper des lentilles sur-mesure si les corrections intégrées ne sont pas suffisantes. Certaines lunettes FPV permettent aussi de changer les modules de réception vidéo (vRx) pour gagner en qualité (RapidFire, True-D X, Foxeer Wildfire, etc.).
A l’inverse des masques, le principal inconvénient sera le prix. Le haut de gamme est occupé par FatShark et plus récemment Orqa. D’autres acteurs proposent aussi des lunettes de qualité mais avec un positionnement milieu de gamme (SkyZone, Eachine