


Dans ce premier article sur le Diatone Taycan, je vous présentais le châssis, ses subtilités ainsi que les composants que j’allais installer dedans. Dans cette nouvelle vidéo, je vais vous montrer comment j’ai monté tout ça avant d’effectuer les réglages et les premiers tests en vol.
Montage, réglages et maiden du Taycan

Agencement de l’électronique
Durant la phase de montage à blanc, j’ai effectué de nombreux essais. J’avais en tête d’installer le Caddx Vista au dessus de la stack ESC/FC, tant par le côté pratique d’avoir les ports USB accessibles pour les 2 que pour la répartition des masses bien centrées.

Malheureusement, la pile était un peu haute et le passage de la sangle pour la LiPo était compliqué. De plus, j’avais peur que le poids du Vista entraîne une instabilité (des vibrations) de la stack tout en la fragilisant (en cas de choc).
Du coup, j’ai installé le Vista sur l’emplacement 20 x 20 mm à l’avant, juste derrière la caméra. Il a donc fallu que je mette une rallonge pour l’antenne. J’ai commencé par une 10 cm qui était très tendue… Au premier crash, le support en TPU pour l’antenne a joué son rôle d’amortisseur, arrachant au passage la pigtail… J’ai finalement remplacé cette dernière par un modèle de 15 cm qui laisse suffisamment de jeu pour faire face à ce genre de problème.
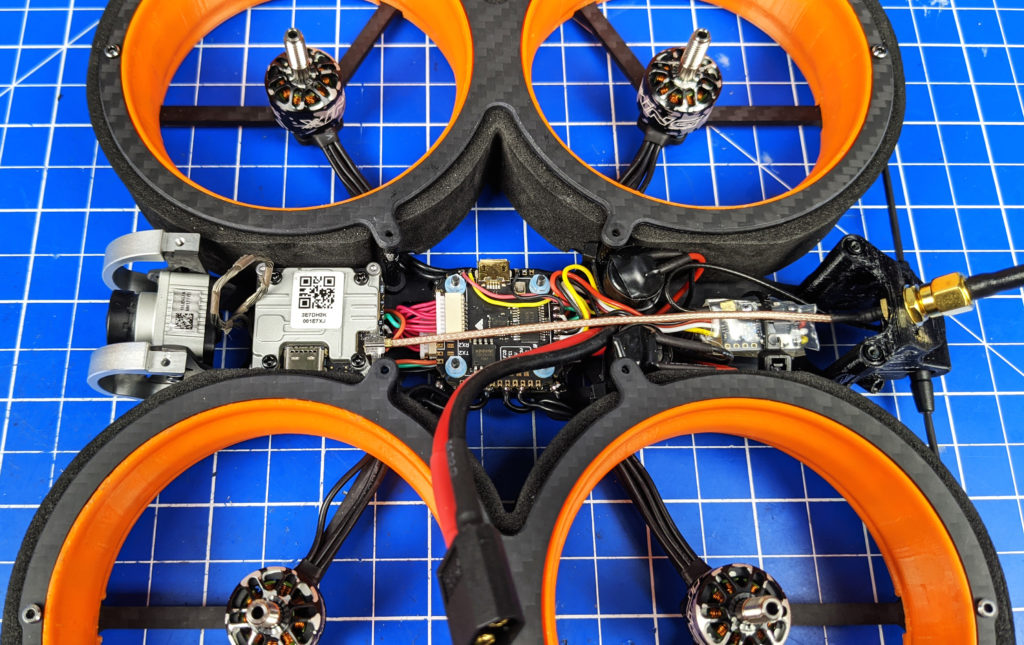
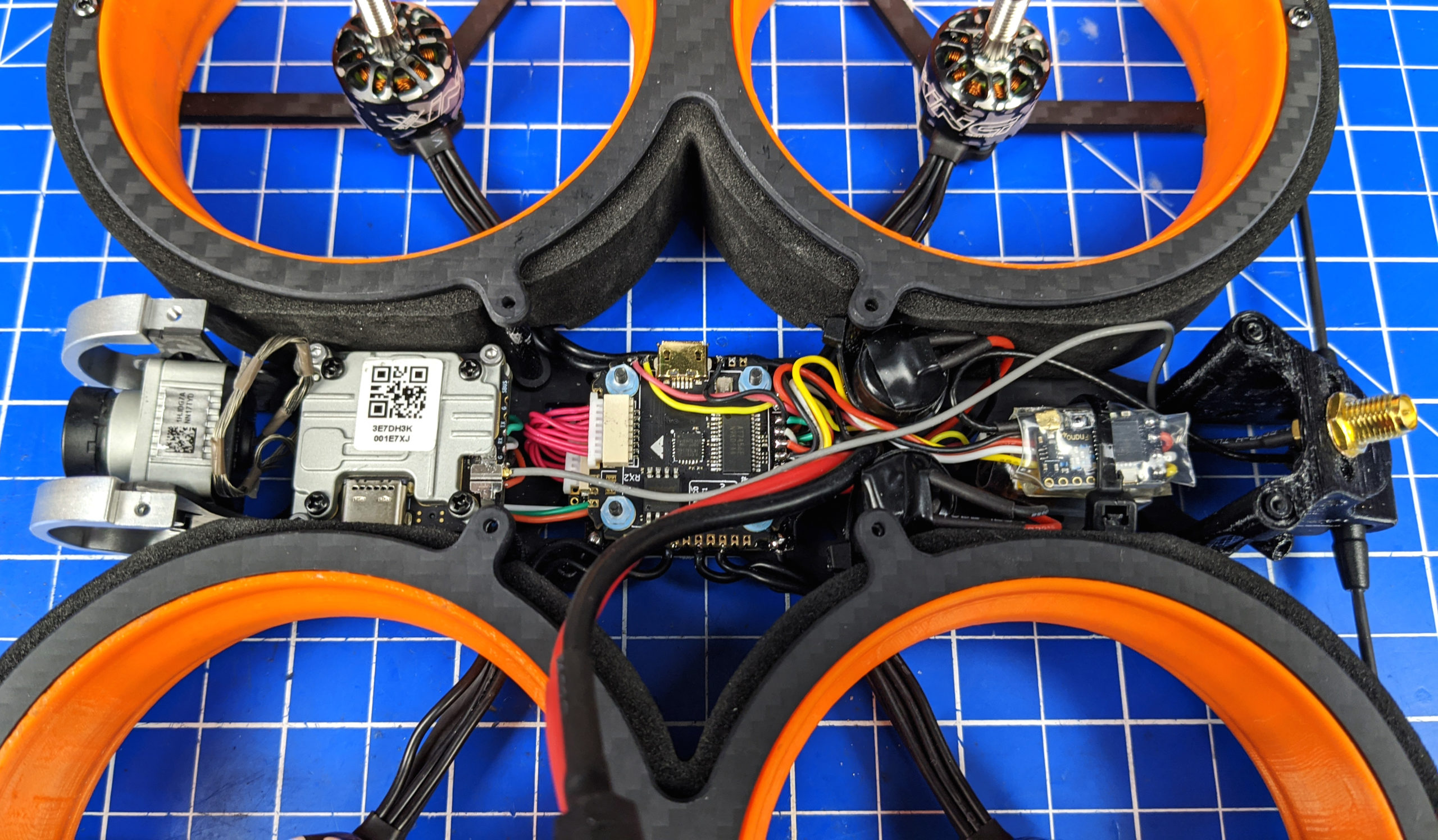
A l’arrière, on retrouve donc 2 condensateurs low ESR 680 uF de chez Panasonic, un Vifly Finder V2 et le récepteur CrossFire Nano. Ces 2 derniers sont collés entre eux avec du scotch double face épais et amortissant et sécurisé avec un rizlan. Le bouton du buzzer est accessible sous la bottom plate.

Soudure des moteurs
Afin de ne pas démonter les ducts pour installer et souder les moteurs, je les ai d’abord montés à blanc. Ainsi, j’ai pu mesurer et couper les fils à la longueur nécessaire (avec un peu de marge). Ensuite, j’ai démonté les moteurs dans le but de tirer les fils et de les souder sur les ESCs sortis du bus.
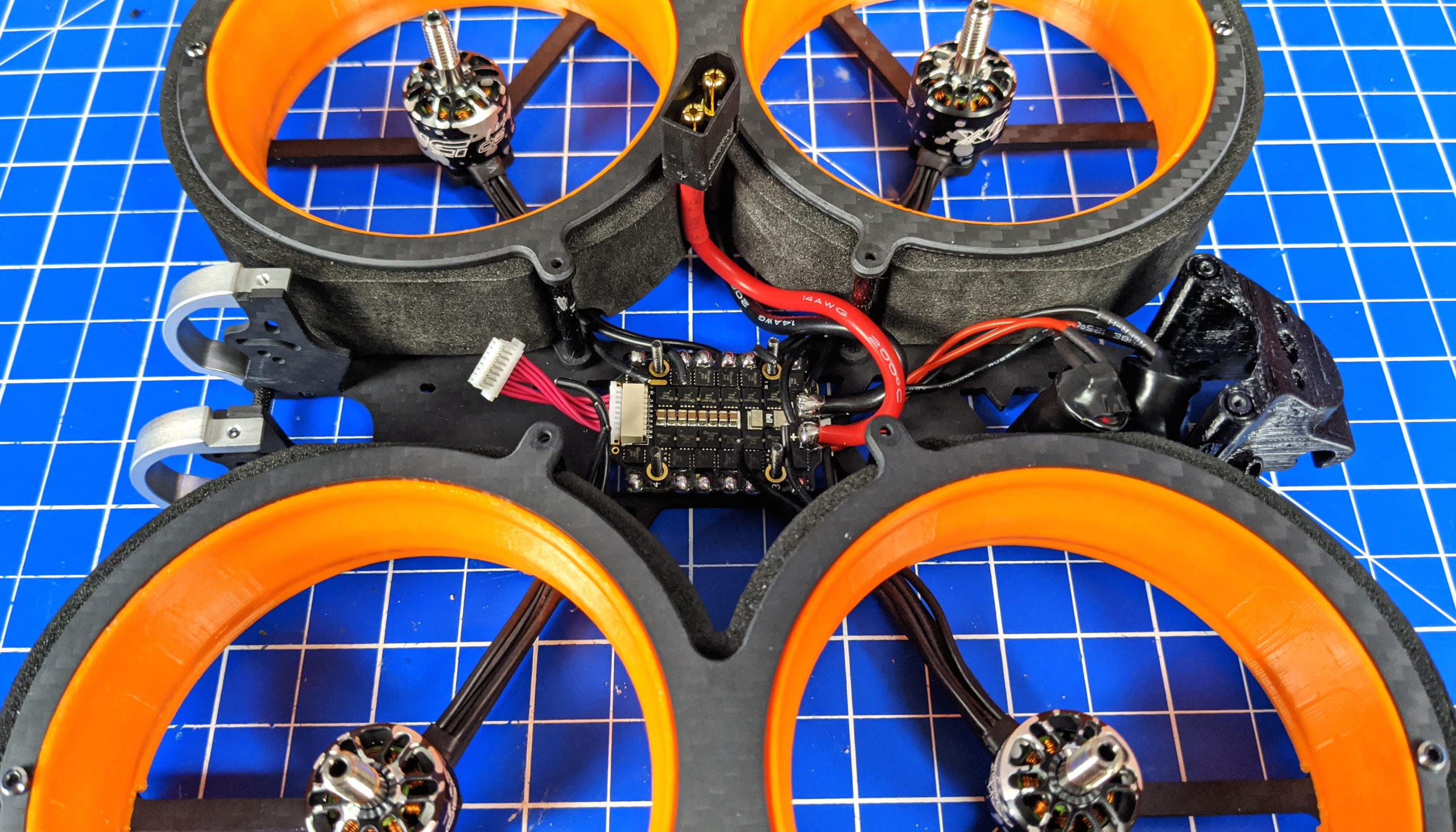
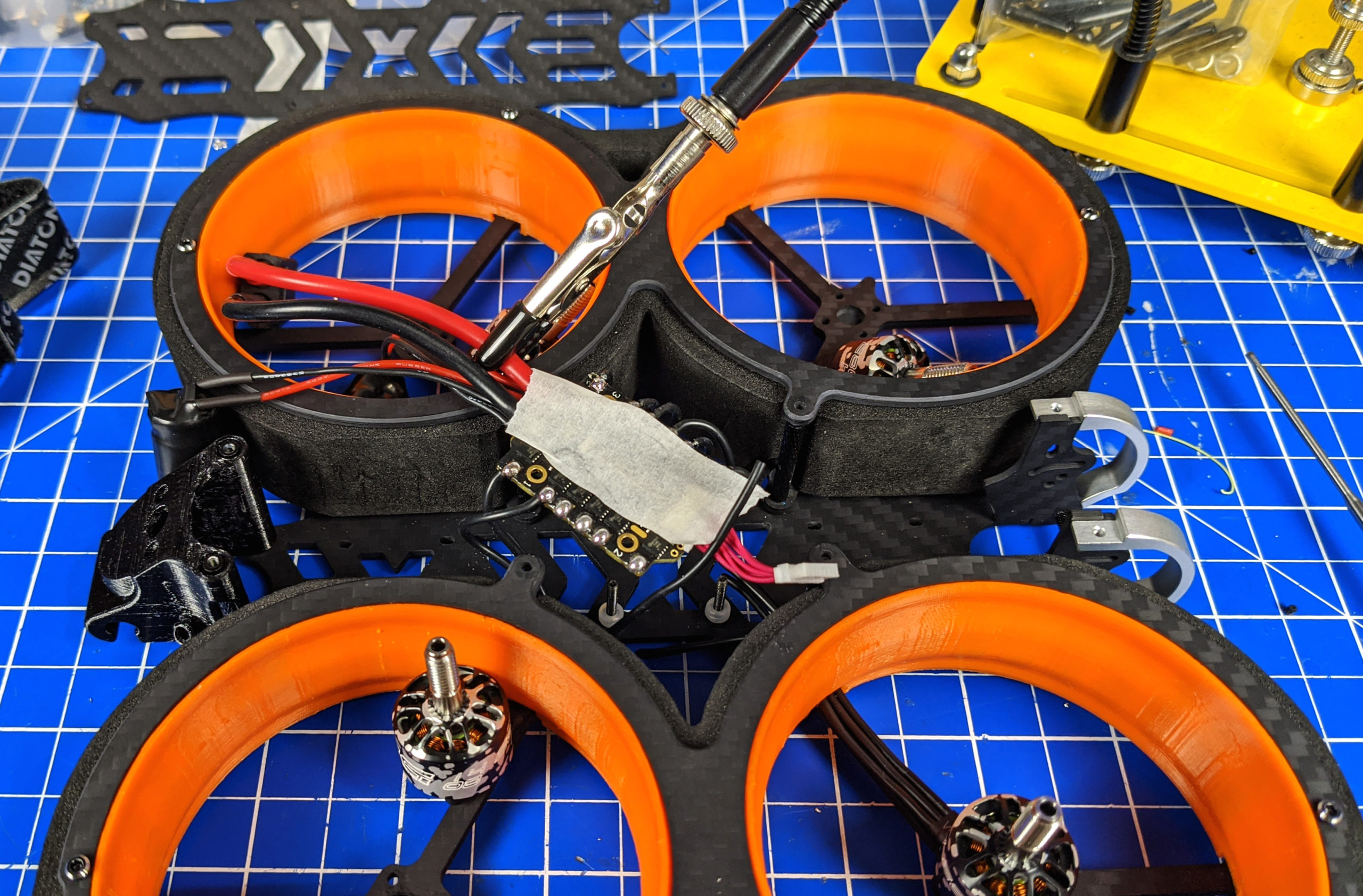
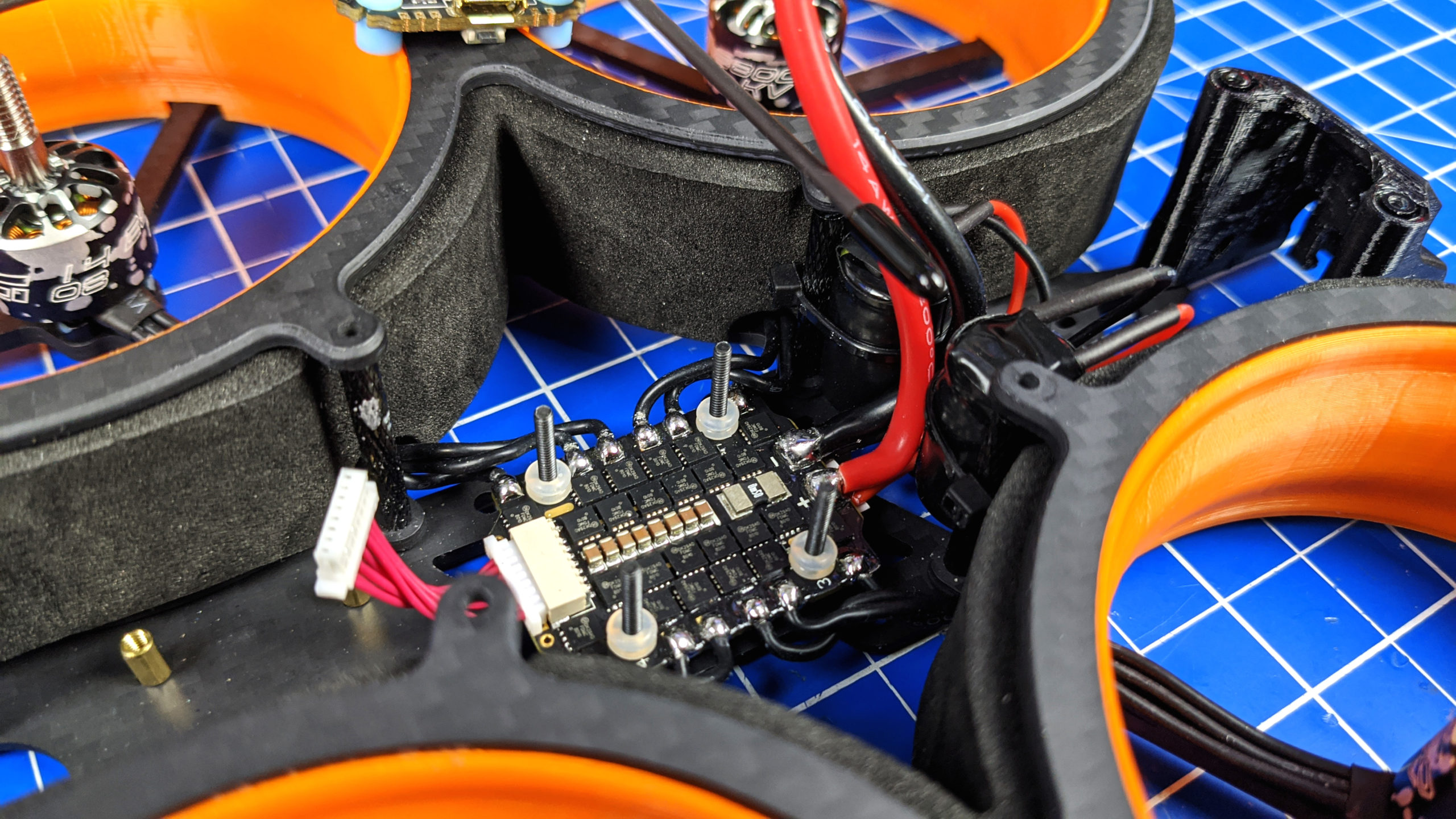
Par contre, pour changer un moteur ça risque d’être pénible… A terme je vais voir s’il n’y a pas des petits racewire qui pourraient aller sur ce Taycan.
Vous pouvez retrouver d’autres photos du montage dans la rubrique DroneBuilds du forum.
Réglages BetaFlight / EmuFlight
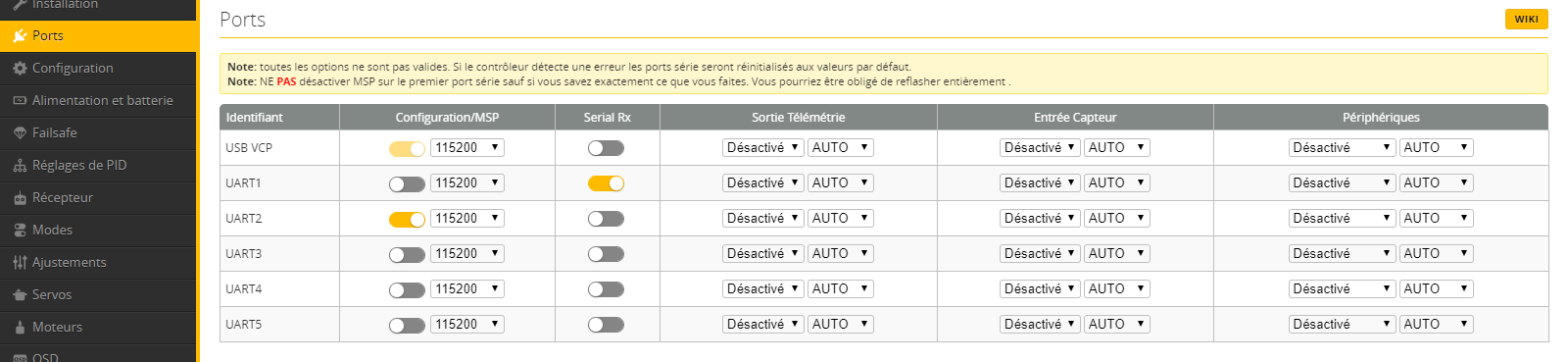
En ce qui concerne le contrôleur de vol il n’y a rien de particulier. La seule nouveauté pour moi fut la configuration du système DJI mais il n’y a rien de plus simple. En effet, il suffit d’activer le MSP sur l’UART qui va bien dans l’onglet ports du configurateur.
Par contre, niveau PID j’ai peiné. J’ai tout d’abord essayé avec EmuFlight et le preset Cinéwhoop. Cependant, il est fait pour du 4S et mes moteurs chauffaient beaucoup avec, sans compter les vibrations sur la GoPro (pas dans le masque). Malheureusement, même en configuration stock ces vibrations sont visibles et le feeling aux sticks est plus que moyen. J’ai donc testé avec BetaFlight 4.2. C’était un peu mieux niveau vibrations mais ça chauffe toujours, même en filtrant plus et en baissant les PIDs. D’ailleurs, c’est pas pire en filtrant moins et en montant un peu les PIDs et pour le coup c’est bien mieux aux sticks ! Par contre, il faut toujours jouer de l’hypersmooth ou de ReelSteady GO pour avoir des rushs HD exploitables…
Si vous souhaitez en savoir plus sur mes différents essais de réglages et avoir des captures d’écran des configuration, je vous invite à consulter le topic unique du Taycan.
Quelques photos supplémentaires






Rush GoPro Hero8 avec Hypersmooth

Rush GoPro Hero8 avec ReelSteady GO

Rush GoPro Hero8 RAW

Même spot, même style mais en 5″

Conclusion
Avec une GoPro Hero8 (dans son support en TPU) et une LiPo 1300mAh 6S j’obtiens une autonomie qui va de 4 à 7 minutes en fonction du type de vol. Sur le même type de vol, j’arrive à peu près à la même chose avec mon Gravity. De plus, avec ce dernier le feeling aux sticks est bien plus agréable et les nuisances sonores moindres. Par contre, le stress en vol n’a rien à voir, surtout en « proximity » où il faut bien canaliser la puissance et ou la moindre touchette ne pardonne pas. C’est sur ce point que le cinéwhoop trouve tout son intérêt. On vole « pépère », sans pression. On peut également s’approcher des personnes et animaux sans gros risque.