Les PID. Ils fascinent, ils inquiètent, mais ils font surtout voler nos drones. Ils assurent aussi le fonctionnement de nombreux objets de notre quotidien sans même que nous le sachions ! Dans cet épisode, nous lèverons une bonne fois pour toute le mystère sur ces 3 lettres et sur cet algorithme ultrapuissant et beaucoup plus simple qu’il n’y paraît.
L’épisode 2 de la série « Au Cœur du Drone »

La promesse de l’épisode
Dans tous les tutos FPV disponibles sur les PID, on vous explique comment régler un régulateur PID, on vous donne des recettes à appliquer sans réfléchir.
Dans cet épisode, on plonge au cœur de la boucle PID pour comprendre comment fonctionne réellement cette méthode d’asservissement.
A la fin de cet épisode, vous saurez donc comment chaque terme (P, I et D) participe au bon comportement d’un système, qu’il s’agisse d’un drone, d’une machine à café ou d’un frigo ! Le tuning d’un régulateur PID deviendra alors une évidence.
Au passage, vous découvrirez rapidement les possibilités de la plateforme Arduino.
Les sujets abordés
Dans cet épisode, nous discutons des aspects suivants :
- Un régulateur PID, c’est quoi ?
Explication théorique (schéma, courbes, formules…) - Introduction à la plateforme Arduino
Présentation générale de la plateforme - Le prototype
Présentation du protype - Implémentation sans PID
Problématiques d’une approche « classique », sans PID - Implémentation avec PID
Solution apportée par les PID - Tuning du régulateur PID
Réglage (tuning) de notre prototype - Les PID dans Betaflight
Réglage des PID dans Betaflight


Les points à retenir
Tutos pratiques
Cet épisode est très théorique, bien qu’on utilise un prototype pour montrer l’effet des PID. Nos 2 tutos sur le tuning illustrent ce processus pour nos drones de manière très concrète :
- Tuto Tuning Betaflight 4.3 : les sliders en vidéo
- Tuto tuning avancé : mieux comprendre votre drone, des PID à la Blackbox
Schémas simplifiés
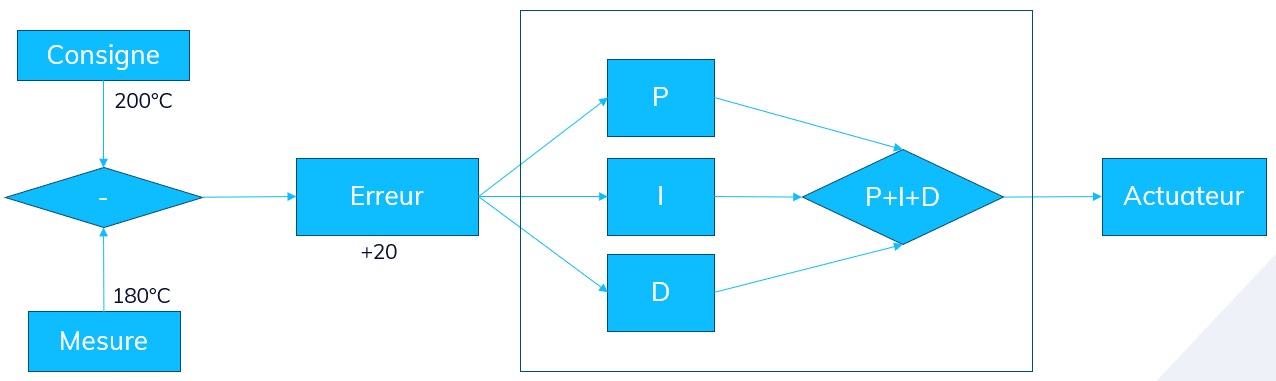
Voici un aperçu de la boucle PID :

Notre régulateur prend en entrée l’erreur à corriger :
Résumé
Ce qu’il faut globalement retenir :
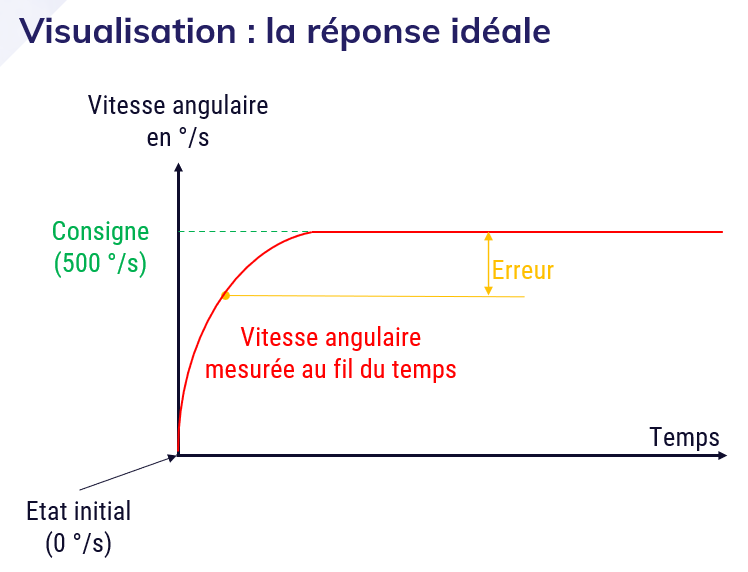
- Un régulateur PID a pour but de piloter le système pour qu’il atteigne la consigne le plus efficacement possible (le plus rapidement possible et sans dépassement ni dérive au fil du temps).
- Un régulateur PID travaille sur l’Erreur. L’erreur c’est la différence entre la consigne et la mesure actuelle de l’état du système (Erreur = Consigne – Mesure)
- Les P sont proportionnels à la taille de l’erreur. Plus l’erreur est importante et plus ils vont agir fortement. Quand l’erreur est faible, les P ne suffisent plus à corriger l’erreur statique.
- Des P élevés permettent d’avoir un système très réactif, mais qui risque de dépasser la consigne tellement il réagit fortement.
- Les I viennent assister les P en emmagasinant de l’erreur, ils font de l’intégration. Quand l’erreur est faible, au fil des tours de boucle, les I vont accumuler suffisamment d’erreur pour finir de résorber l’erreur.
- Les D surveillent la vitesse de variation de l’erreur (et non sa taille comme les P). Si l’erreur diminue très rapidement (sous l’effet des P), les D vont venir compenser en amortissant l’action des P, ce qui limitera les dépassements de consigne.
- Les D amplifient les vibrations, ils nécessitent un signal propre (bien filtré)
- Un système bien réglé atteint très rapidement la consigne, sans dépassement ni dérive (erreur statique).
- Dans Betaflight les curseurs (sliders) sont très efficaces pour régler les PID tout en maintenant une cohérence entre les coefficients de chaque terme.
- On recommande la désactivation de l’atténuation dynamique (D max) en tirant le slider à 0.
- Le slider du Multiplicateur Maître permet d’augmenter ou diminuer les coefficients de manière global et cohérente : pas besoin de retuner, l’équilibre entre les termes est maintenu.
Un exemple de réponse « idéale », sans dépassement ni dérive :