

Depuis 2018, nous avions le droit à 2 ou 3 releases majeures par an. Mais Betaflight 4.2 étant sortit début d’été 2020, la relève se fait attendre. La voici donc enfin, cette version de Betaflight 4.3. L’attente en valait-elle la peine ? Oh que oui.
Nous la suivons de près et volons avec depuis pratiquement un an maintenant. On vous explique en quoi cette release se distingue des autres, pourquoi il ne faut pas hésiter à y passer et surtout, comment en tirer le meilleur.
4.3 : la release de la maturité
Certaines versions majeures ont reçue un accueil mitigé, en particulier lors du passage entre la 3.5 et la 4.0 (puis à la 4.1). L’arrivée des « unified targets« , du RPM filter ou encore des sliders PIDs/Filters s’est faite dans la douleur.
Avec la 4.2, Betaflight finalisait sa difficile transition amorcée depuis la 4.0, les problèmes étaient réglés et les évolutions majeures bien en place. Une belle version stable.
Pour cette nouvelle version 4.3, on a le sentiment que les développeurs ont pris leur temps pour tester différentes approches, analyser les retours, refaire complètement certaines parties, ajouter de nombreuses nouveautés, bref : décider de la direction à prendre sans s’imposer de contrainte de délais, pour sortir une version mature de Betaflight.
Nous sommes nombreux au sein de la communauté a avoir volé sur des versions de developpement (« nightly builds« ) depuis début 2021, et elle marchait déjà très bien. Elle est donc en test permanent depuis longtemps. La première Release Candidate (RC1) sortie fin décembre 2021 bénéficiait déjà des retours de centaines de pilotes.
Plusieurs nouvelles RC se sont succédées pour corriger quelques bugs et finaliser certaines fonctionnalités (notamment la gestion des « presets »). C’est donc une version finale éprouvée et fiable qui voit le jour.
Avec cette 4.3, Betaflight atteint une vraie maturité, tant en terme de vision (fonctionnalités, performances, ergonomie…) qu’en terme de cycle de développement. Elle est sortit quand elle était prête et quand elle correspondait à ce que l’équipe de développement en attendait. Et ça fait plaisir de voir un projet Open Source aboutir à un si beau « produit », avec un véritable engouement de la part de la communauté.
Les nouveautés de BF 4.3 ?

Cette nouvelle version arrive avec son lot de nouveautés, voici les plus marquantes :
- Gestion de « presets »: ils ciblent différents aspects de la configuration. On a des « presets » dédiés au lien radio, aux rates, aux filtres, au VTX, aux modes, au quad complet etc.
- Un nouveau filtre notch dynamique, plus rapide et efficace, capable de cibler plusieurs pics. C’est sans doute l’une des principales raisons de passer en 4.3
- Une grosse amélioration de l’Antigravity (qui booste maintenant aussi les P, c’est très efficace)
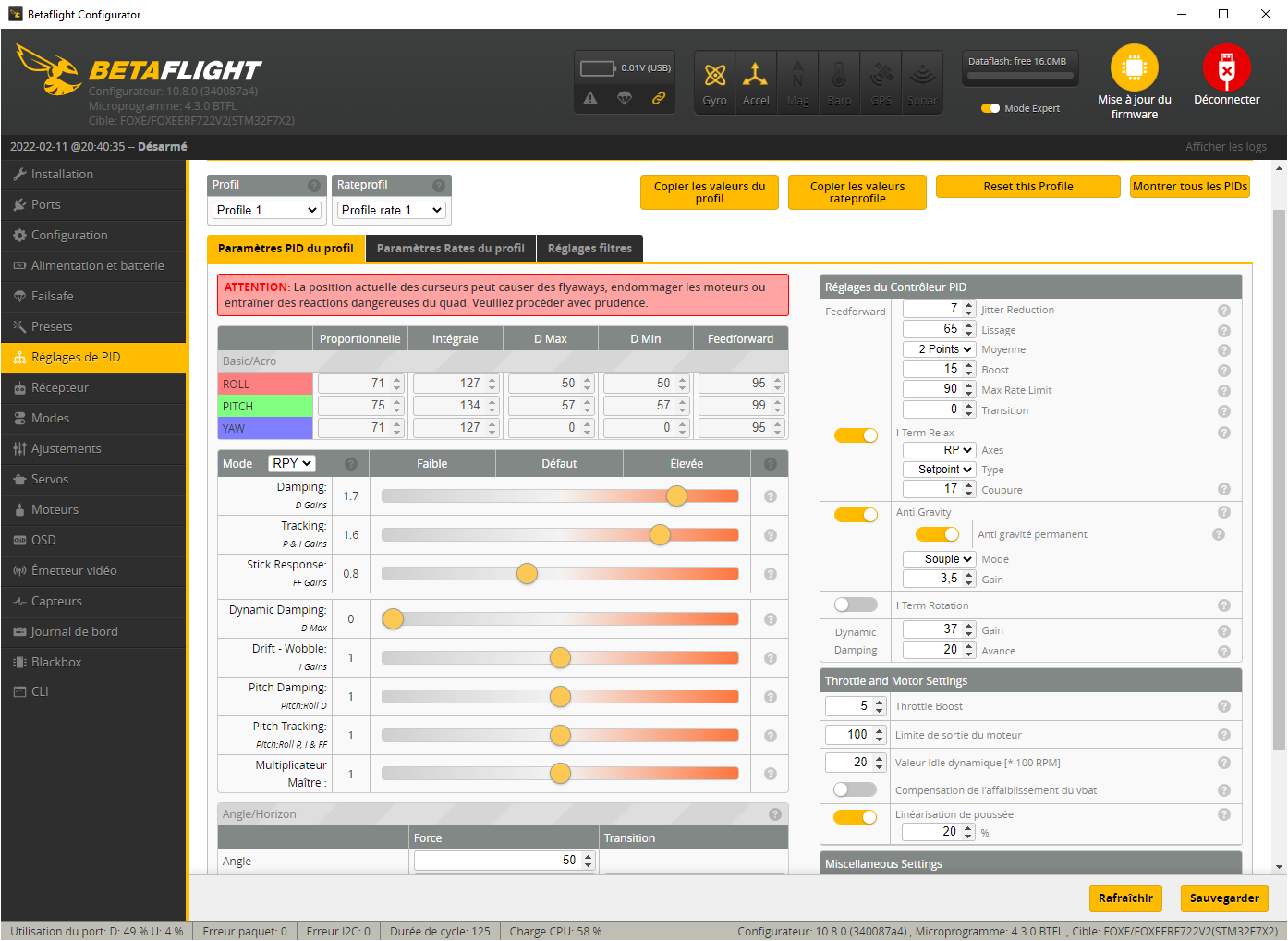
- Un nouveau set de curseurs, pour faciliter le tuning
- Une optimisation du Feedforward qui devient davantage paramétrable
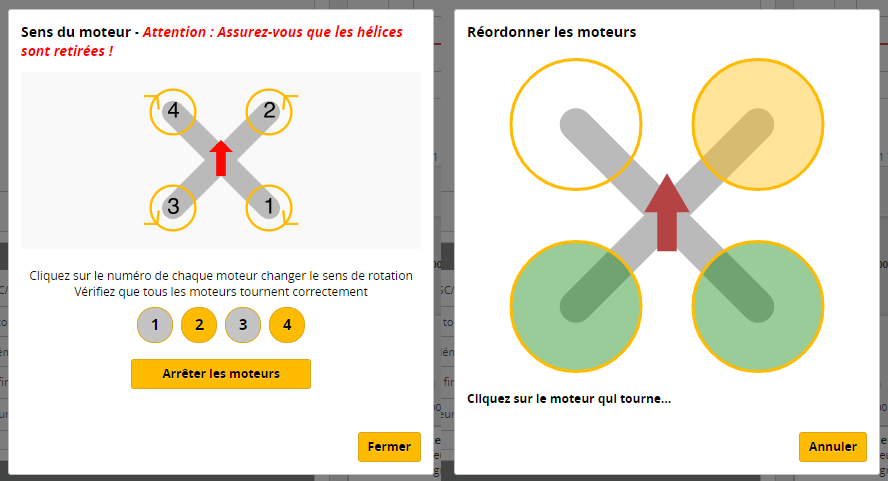
- Le remapping presque automatique des moteurs ainsi que la modification du sens de rotation en quelques clics
- De nouveaux filtres : PT2 et PT3. Ils remplaceront le BIQUAD. Ces filtres règlent quelques défauts du BIQUAD (très consommateur en ressources et générant de l’overshoot).
- RC Smoothing basé sur du PT3
- Configurateur : Auto-détection de la target, pour éviter les erreurs
- Nouveau mixeur linéaire (en provenance de Emuflight). Permet une montée plus fluide des gaz (2 nouveaux modes en plus du « legacy » : « linear » et « dynamic »)
- Le Dynamic Idle a été revu et ne dépend plus du DShot Idle
- Optimisation des APIs qui permettent de gérer le SPI DMA. Ce qui permet d’éviter que l’utilisation de la Blackbox impacte la boucle PIDs
- Les Warnings deviendront accessibles via MSP de manière « propre ». Plus de bidouille à faire, on aura les Warnings dans l’OSD DJI. Mais cela nécessitera que DJI mette à jour sa façon de gérer cet aspect là. Il faudra donc attendre une mise à jour DJI pour en profiter)
- Nouvel élément dans l’OSD : la puissance du lien TX (pour indiquer par exemple si le module Crossfire est à 25, 500, 1000 mW etc.). Ca arrivera donc dans l’OSD Betaflight. Concernant l’OSD DJI, c’est un peu plus compliqué, on devra certainement attendre l’arrivée de la gestion du Canvas mode pour en profiter)
- Support du Crossfire v3 (24 channels, meilleure gestion des erreurs…)
- etc.
Retrouvez l’intégralité des nouveautés sur la page de la release officielle du firmware. L’installation du nouveau Configurateur Betaflight sera aussi indispensable pour mettre à jour votre contrôleur de vol.
Tuning et performances en vol
Plusieurs nouveautés concourent à faire voler nos quad mieux que jamais (nouveau filtre notch dynamique, refonte Antigravity/Dynamic Idle etc.) et plus particulièrement à mieux gérer le propwash. Les réglages par défaut sont désormais meilleurs. Mais l’autre objectif de cette version est d’aboutir à un tuning facile.
Concrètement, tout le monde peut avoir un quad très bien réglé en à peine 2-3 lipos. Depuis Mai 2021, nous tenons à jour un Guide de tuning Betaflight 4.3 sur le forum. Il a évolué en même temps que le firmware, intègre les retours de la communauté et les bonnes pratiques/recommandations tirées des vidéos de Mark Spatz (UAVTech) et Chris Rosser notamment (ainsi que des Tuning Notes 4.3). Pour garder cet article « concis », nous préférons donc vous renvoyer vers le forum, où vous trouverez toutes les informations nécessaires pour régler votre quad en 4.3.
Un « tune » adapté à votre machine sera toujours plus efficace qu’un « preset », et c’est l’approche qui avait toujours été privilégiée par l’équipe Betaflight : plutôt que de livrer des « presets » génériques, ils préféraient nous donner les outils pour régler facilement nos quads. Les nouveaux curseurs (« sliders »), qu’on a vu évoluer au fil des versions et pendant la phase de développement, s’y prêtent parfaitement et rendent enfin les réglages des filtres et PIDs intuitifs.
L’idée de remplacer les P, I, D et Feedforward par des concepts plus concrets tels que le Suivi des sticks (Tracking), l’Amortissement (Damping), l’Oscillation (Wobble) ou la Réactivité des sticks (Stick Response) participent à rendre ces réglages plus instinctifs.
Mais pourtant ils ont ajouté des « presets » !? Oui, ils l’ont fait d’une façon qui reste conforme à leur philosophie, tout en satisfaisant une partie de la communauté qui était en attente de cette fonctionnalité. On en parle en détail un peu plus bas dans cet article.
Ergonomie du configurateur Betaflight 4.3
Avant toute chose, précisons que cette version du Configurateur Betaflight ne supporte plus Windows 7 (et antérieurs). Sous Windows, il faudra être sur une version 64 bits de Windows 8, 10 ou 11.
Si vous êtes habitués au Configurateur de la version 4.2 (10.7), cette version 10.8 ne vous dépaysera pas. Il y a tout de même quelques petites modifications, parfois mineures et de bon sens, parfois extrêmement pratiques :
- Les réglages des ESCs sont déplacés dans l’onglet « Moteurs »
- Les réglages du RX sont déplacés dans l’onglet… « Récepteur » !
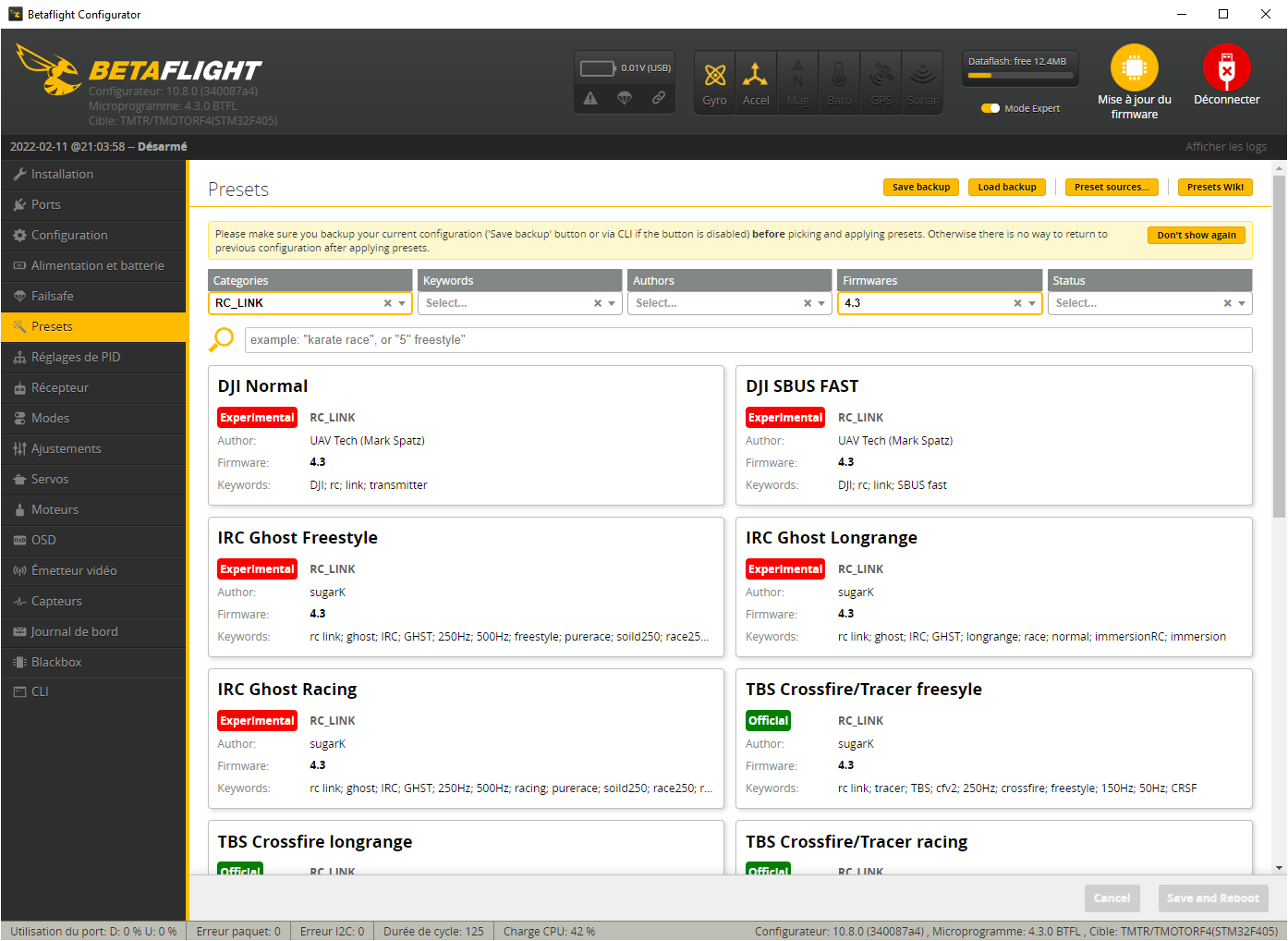
- Une nouvelle page « Presets » a vu le jour. Plus qu’une simple catégorie, c’est une application dans l’application. Elle donne accès à un moteur de recherche et de nombreuses fonctionnalités liées à la gestion de ces derniers
- Au moment de flasher une FC, Betaflight permet d’auto-détecter la Target, pour gagner du temps et limiter le risque d’erreur.
Pour finir, la cerise sur le gâteau : Betaflight 4.3 intègre un assistant pour modifier rapidement l’ordre des moteurs et leur sens de rotation ! Il est accessible depuis l’onglet « Moteurs ».
Les Presets
Ce sujet mériterait un article dédié tant le concept de « presets » a été poussé loin dans cette 4.3.
Initialement, l’équipe Betaflight n’était pas favorable à cette idée, telle qu’on la retrouve dans les autres firmwares. Mais ils ont su faire évoluer ce concept pour rester fidèle à leur philosophie tout en permettant beaucoup plus de choses qu’avec des « presets » classiques :
- Tout le monde peut partager ses « presets », via le repo officiel ou via des repos personnels
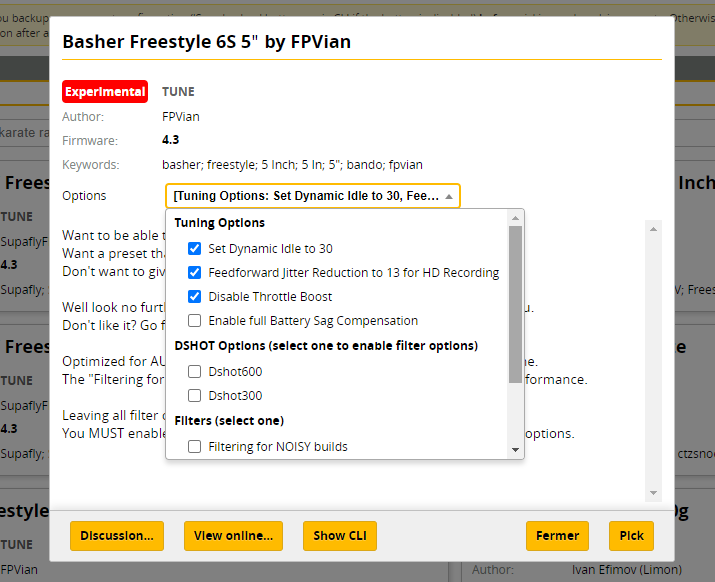
- Les « presets » sont « typés » et ont un périmètre clair : pour le lien radio (Tracer, Elrs 500hz, Crossfire etc), pour le VTX, pour les rates, le tune ou même les LEDs etc.
- Ils ont des options qu’on peut décider d’appliquer ou non
- On peut visualiser facilement l’ensemble de leur contenu
- Il permettent de sauvegarder l’ensemble de notre configuration dans un « preset », ou juste certaines parties pour les partager
On peut facilement appliquer les « presets » idéaux pour notre setup, on n’aura plus qu’à ajuster les PIDs et le filtrage pour avoir une machine optimisée. Il restera bien sûr la possibilité d’appliquer un « preset de Tune » pour ces aspects, si l’ajustement des PIDs/filtres vous effraie encore.
Fonctionnalités « bonus »
Dans cette vidéo, Ivan Efimov présente quelques fonctionnalités « secrètes » de Betaflight, ou plutôt méconnues. Certaines arrivent avec la 4.3, d’autres étaient déjà présentes.
Au rayon des nouveautés, nous avons maintenant la possibilité de nous connecter à une « FC Virtuelle« . Qui ne s’est pas déjà retrouvé à devoir brancher une FC, juste pour vérifier la présence d’un réglage ou pour faire une capture d’écran ? C’est désormais possible en activant le mode de connexion virtuelle, dans le menu « Options » :
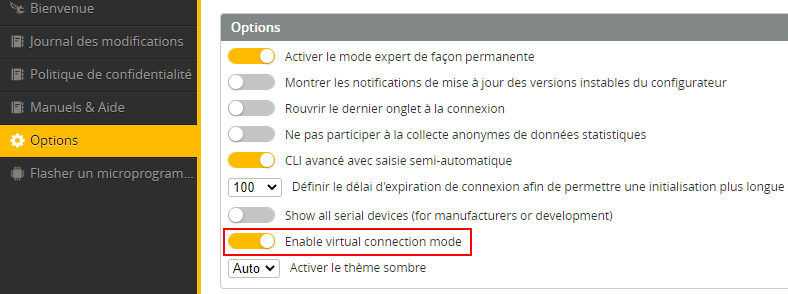
Vous donnant dorénavant accès à une carte de vol virtuelle, accessible dans la liste des ports :

Le menu « Alimentation et batterie » voit l’arrivée d’un nouveau bouton « Etalonnage », permettant de calibrer plus facilement les capteurs de tension et de courant, en saisissant les valeurs mesurées.
Depuis la 4.2, Betaflight intègre un compteur de vols (« stats_total_flights« ), mais la 4.3 ajoute la possibilité de l’afficher dans l’OSD et de définir à partir de combien de temps un vol est comptabilisé (set stats_min_armed_time_s = 50, pour 50 secondes). Le compteur de vol est définissable via le CLI, attention donc à ne pas le perdre en cas de flash ou de rechargement de DIFF par exemple.
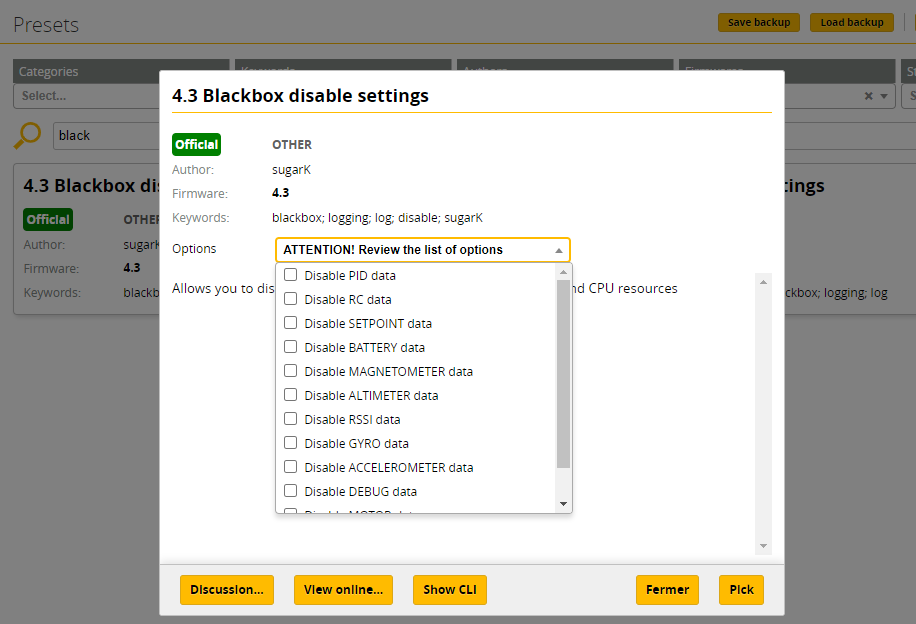
Parmi les astuces présentées par Ivan, on retrouve aussi un Preset permettant de désactiver facilement certaines données écrites par la BlackBox, ce qui permet de stocker beaucoup plus de vols dans le même espace mémoire, si seulement certaines informations vous intéressent, comme uniquement les données gyro pour une utilisation avec Gyroflow :
Conclusion
Betaflight 4.3 n’a pas vraiment de défaut, tout a été amélioré. Régler son quad n’a jamais été aussi facile et ça vole mieux que jamais.
Vous l’aurez compris, on ne peut que vous conseiller d’essayer cette nouvelle version. N’hésitez pas à venir partager vos retours ou poser vos questions sur le forum.
Et maintenant, en route vers BetaFlight 4.4 !